Tutorial: Activate / Deactivate RTC
7069 view(s)
0 comment(s)
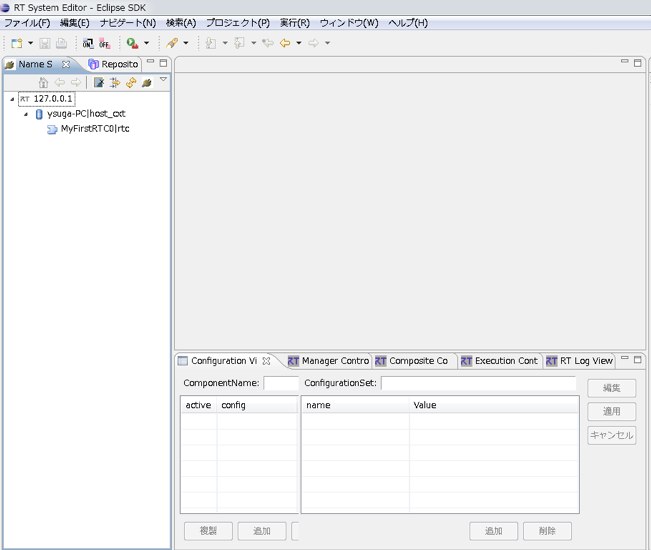
Launch RT System Editor
Launch your "All-In-One eclipse" and please select "RT System Editor" perspective.
(Menu >> Window >> Perspective >> RT System Editor)
クラウド型音声認識搭載SDKのコンポーネント
概要
Documentation: