移動ロボット開発支援のためのRTコンポーネント群
移動ロボット開発支援のためのRTコンポーネント群
Post date:
Thu, 2016-10-27 22:25
概要
- 早稲田大学尾形研究室で開発された移動ロボット用プラットフォームであるMobileRobotNavigationFrameworkを実機とシミュレーションの両方で利用できる環境を構築する.
特徴
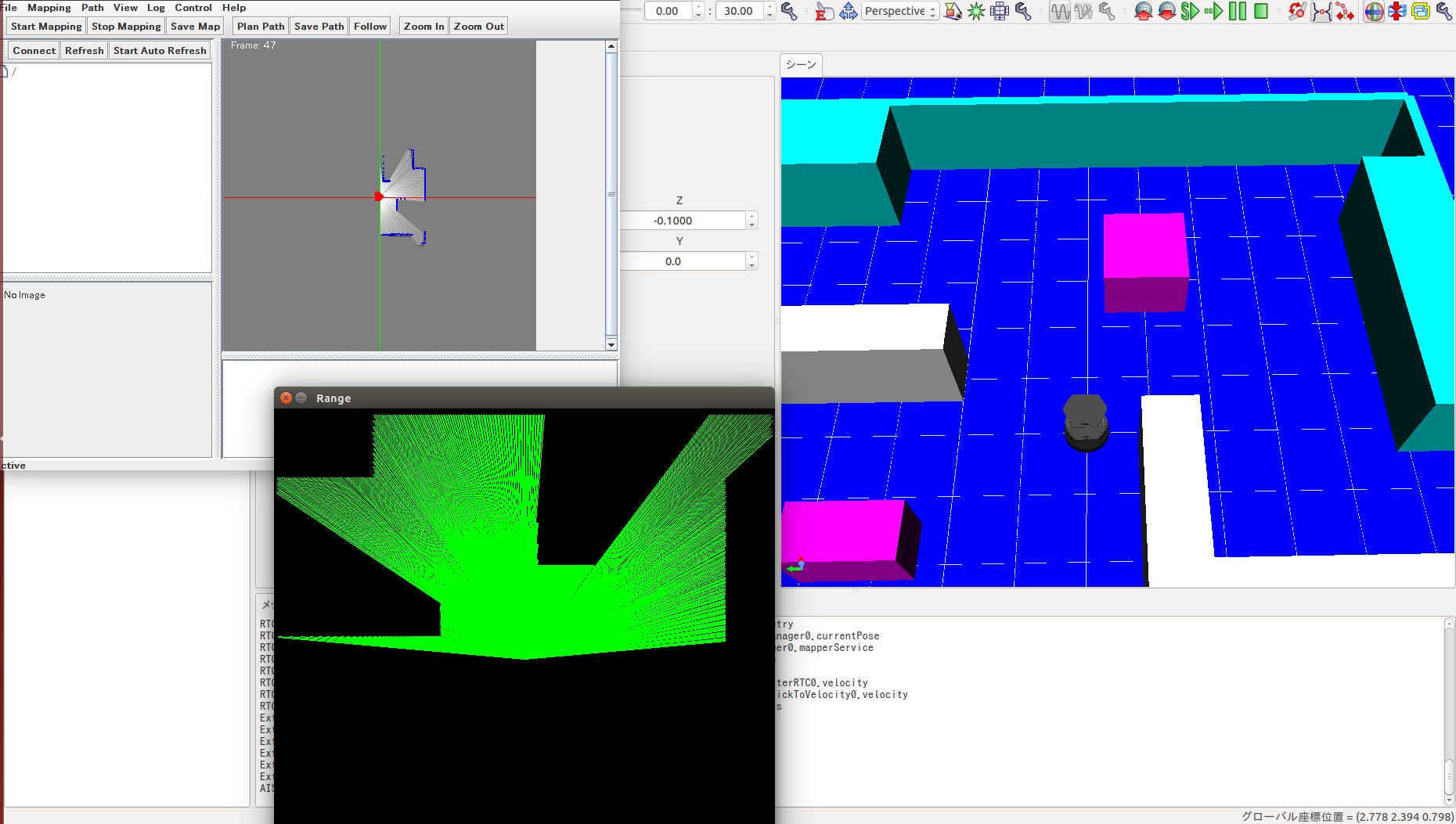
- Choreonoid上で移動ロボットのモデルを用いた環境地図生成
- MobileRobotNavigationFrameworkをlinux環境で動かすためのマニュアルの作成
- LinuxでのMobileRobotNavigationFramework利用までのShellスクリプトの作成
仕様
- 言語:C++
- OS:Ubuntu 14.04
- OpenRTM-aist-1.1.2-RELEASE
コンポーネント群
- RangeDataViewerRTC:hrpsys用のソースコードをRTC化したものです.ソースコードはこちらを参考にしています.
- VelocityConverterRTC:MobileRobotNavigationFrameworkのJoustickをchoreonoidのモデルに対応するように変換するためのコンポーネント.
ソースコード
- Choreonoidで移動ロボットを動かすにはこちらからダウンロードしてください.
- LinuxでのMobileRobotNavigationFrameworkのためのShellスクリプトはこちらからダウンロードすることができます.
マニュアル
- Choreonoidでシミュレーションを行うためのマニュアルはこちらを参照してください
問合先(メールアドレス):
130447091@ccalumni.meijo-u.ac.jp
Last modified:
Tue, 2016-12-13 19:18
Comments
マニュアルはありますか?
名城大学の村瀬です.ご返信ありがとうございます. マニュアルにつきましてはUPを忘れておりましたので,至急対応させていただきました.
この度は,ご指摘いただき誠にありがとうございました.
度々すみません。ソースコード、マニュアルを読んだのですが、以下の点が気になりました。
名城大学の村瀬です.重ね重ねのご指摘ありがとうございます.対応が遅れてしまいましたが,それぞれのご質問に対して答えさせていただきます.
・PoseConverterRTCですが,新たにデータが入力された場合に値を変換させたデータを出力するものとなっております. また,onActivated関数では初期化する工程を入れて忘れてしまっていたので,修正されていただきました.
・VelocityConverterRTCのコンフィグレーションパラメータのWheel_radiusは以前のものが残ってしまっていた為,後日修正したものをあげさせて頂きたいと考えております.
・VelocityConverterRTCのREADME.txtですがご指摘頂いた通りこちら側のミスでしたので修正版をあげさせて頂きました.
・「郡」の件もご指摘の通り「群」が正しいものとなっておりますので修正させて頂きました.
この度は,こちらの不手際に対してご指摘頂きまして誠にありがとうございました.
産総研の高橋です.更新ありがとうございます.
内容を確認させていただきました.
既存のコンポーネント群を再利用し,Choreonoid に対応した非常に有用なシステムの提案だと感じました.
細かい点で申し訳ございませんが,3点質問&コメントがあります.
・PoseConverterRTC::onExecute() はデータが入力されていなくても常にデータ出力する仕組みなのでしょうか.
・RangeDataViewerRTC::onExecute の入力データ判定に違和感がありました.データがあるときのみ処理するのであれば L.137 の if 分を有効化した方が正しいと思うのですが,何か問題があったのでしょうか.
・スクリプトを見る限り,ナビゲーション側の機能も動作確認できていると思うのですが,もし動作確認できていましたら,マニュアルにも使用方法を記載いただくとアピールになると思います.
名城大学の村瀬です.ご指摘頂きましてありがとうございます.対応が遅れてしまいましたが,それぞれのご質問に対して答えさせていただきます.
・PoseConverterRTC::onExecute()内でのデータに関してですが,新たにデータが入力された場合に値を変換させたデータを出力するものとなっております.if文の括弧を閉じる位置のミスでしたので修正させて頂きました.
・RangeDataViewerRTCですが,金広様がgithub上にあげておりますhrpsys-baseに同封されているRangeDataViewerのソースコードを利用しやすいように単独のコンポーネント化したものであり,ソースについては手を加えていませんので問題につきましてはお答えすることは出来ませんが,ご指摘頂いたきました箇所につきましては確認後,対応させて頂きたいと考えております.
・ナビゲーション側の機能の動作確認ですが実機を用いた検証は済んでおりますのでマニュアルとして公開されて頂きましたが,Choreonoidでの動作検証が済んでおりませんので,済み次第マニュアルも追加していきたいと考えております.
この度は,ご指摘頂きまして誠にありがとうございました.