RTミドルウェア学習用ロボットアーム制御RTコンポーネント群
RTミドルウェア学習用ロボットアーム制御RTコンポーネント群
Post date:
Sun, 2015-10-25 12:01
概要・特徴
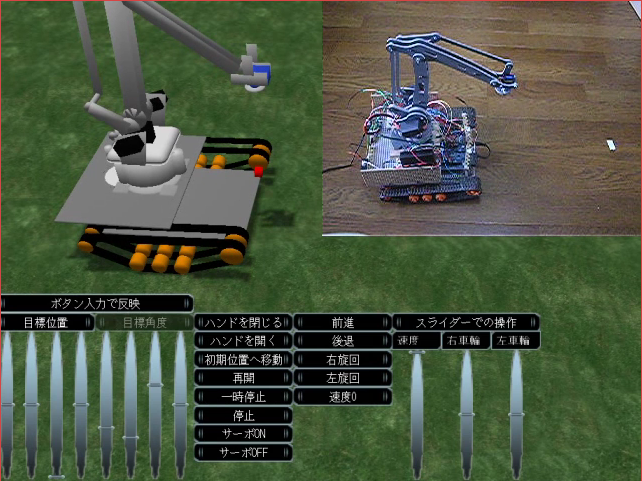
- Intel Edisonによりロボットアームを制御するためのRTC群
- サインスマート製4自由度ロボットアームを制御
- GUIによる操作
- GUIを作成するためのツールも開発
- ロボットアームを移動させるためのクローラーを制御するRTC群も付属
- 地磁気、加速度センサにより姿勢を計測、GUIで表示
- 距離センサで障害物を検出して自動的に回避運動
仕様
- 言語:C++、Python
- OS
- Intel Edison:Ubilinux
- PC:Windows 8.1、Ubuntu 10.04、Ubuntu 12.04
- RTミドルウェア:OpenRTM-aist-1.1.1-RELEASE、OpenRTM-aist-Python-1.1.0-RELEASE
コンポーネント群
- GUI
- アーム制御RTC
- クローラー制御RTC
- RTno対応サーボ制御RTC
- シミュレーター
- PWMサーボドライバ制御RTC
- 6軸センサ(LSM303DLHC)RTC
- モータードライバ(TA8428K)RTC
- 距離センサ(GP2Y0A21YK)RTC
- 加速度センサ(KXR94-2050)RTC
- 加速度センサ(KXSC7-2050)RTC
- ジャイロセンサ(ENC-03R搭載モジュール)RTC
- ジャイロセンサ(L3GD20)RTC
- モータードライバ(TA7291P)RTC
- 9軸センサ(LSM9DS0)RTC
- 温度センサ(ADT7410)RTC
- ADコンバータ(MCP3002)RTC
- ADコンバータ(MCP3208)RTC
- デジタル出力RTC
- アナログ入力RTC
- PWM出力RTC
ソースコードおよびマニュアル
- アーム、クローラー制御RTC
- マニュアル
- ソースコード
- GUI
- アーム制御RTC
- クローラー制御RTC
- RTno対応サーボ制御RTC
- シミュレーター
- PWMサーボドライバ制御RTC
- 6軸センサ(LSM303DLHC)RTC
- モータードライバ(TA8428K)RTC
- 距離センサ(GP2Y0A21YK)RTC
- 加速度センサ(KXR94-2050)RTC
- 加速度センサ(KXSC7-2050)RTC
- ジャイロセンサ(ENC-03R搭載モジュール)RTC
- ジャイロセンサ(L3GD20)RTC
- モータードライバ(TA7291P)RTC
- 9軸センサ(LSM9DS0)RTC
- 温度センサ(ADT7410)RTC
- ADコンバータ(MCP3002)RTC
- ADコンバータ(MCP3208)RTC
- デジタル出力RTC
- アナログ入力RTC
- PWM出力RTC
- GUI作成ツール
ライセンス
- GPLv3
動画
問合先(メールアドレス):
TyouKyozyakuTaisitu<at>yahoo.co.jp
Last modified:
Wed, 2016-11-02 15:51
Comments
シミュレータを起動するとうまくいきました.こういう軽いやつを求めていたので,どこかで使わせてもらうと思います.
GUIは起動できなかったです.
C:\Users\ysuga\Desktop\RobotArmGUI-master\EXE>OgreRTTool_Python27 ../RobotArmCra wlerGUI.py This application failed to start because it could not find or load the Qt platfo rm plugin "windows".
Reinstalling the application may fix this problem.
このようなメッセージがでます.ネットを調べるとQtのバイナリが足りてい無いということですが,自分の環境のQtのバイナリを入れてもダメでした.VC2013版だからですかね? もし心当たりがあれば,直す方法を教えてください.
対応しているUbuntuのバージョンについてですが,ここのページでは12.04で,マニュアルページでは10.04と書いてありました. どちらが正しいでしょうか? または,10.04以降であれば問題ないという意味でしょうか? 「複合コンポーネント作成ツール」のページも同様の不一致状態になっていますので,確認いただければ幸いです.
コメントありがとうございます。 10.04と12.04で動作確認したのでこのページが間違っています。 修正したのでよろしくお願いします。