Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 154 |
| RT-Middleware | 35 |
| Tools | 23 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
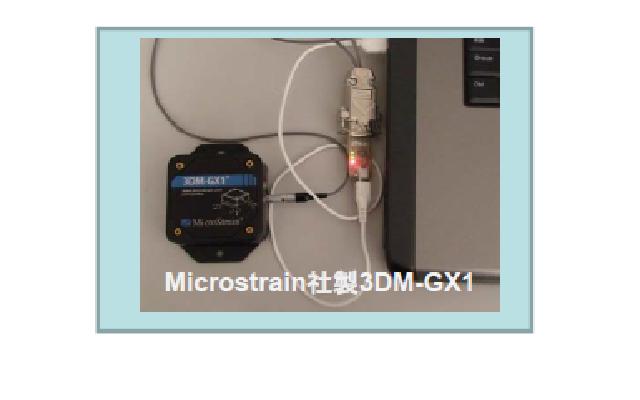
CXL RTC (Crossbow社製:CXL02LF3)
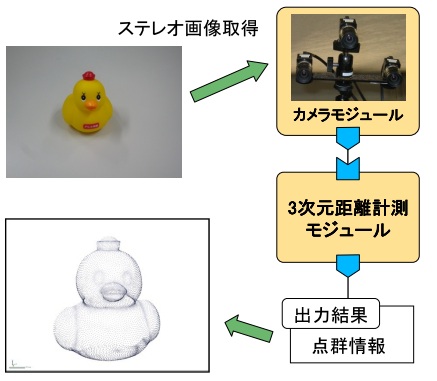
概要
Crossbow社製の加速度センサCXL02LF3のRTC。
実行バイナリとマニュアルのみの配布。
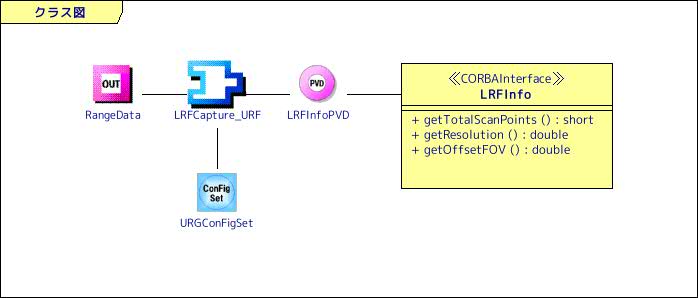
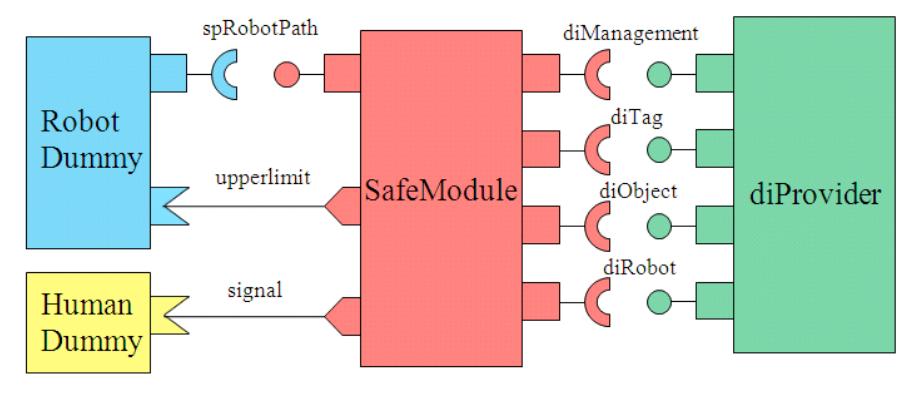
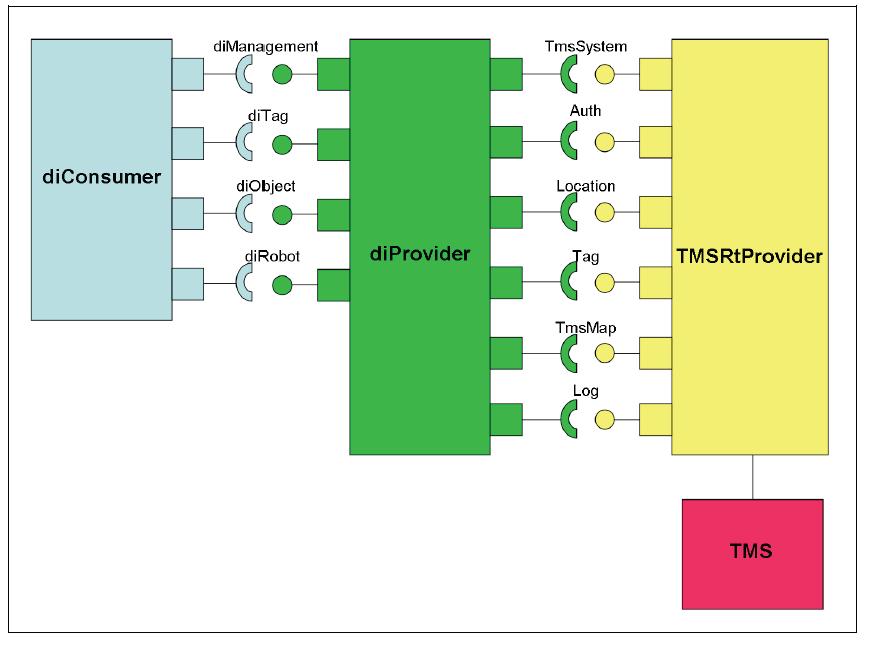
独自定義のIDLによりデータポートとサービスポートを規定。
ライセンス
非営利・非商用での利用に限り、バイナリーファイルにて
無償公開にしています。
商用利用やソースコードの提供に関しましては
下記へご相談ください。
Download
弊社の自社サイトでの公開を予定しています。
詳しくは、下記へご連絡願います。
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクトの一環として
開発されたことを記し、ここに感謝の意を表する。