
Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 154.5 |
| RT-Middleware | 35 |
| Tools | 23 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
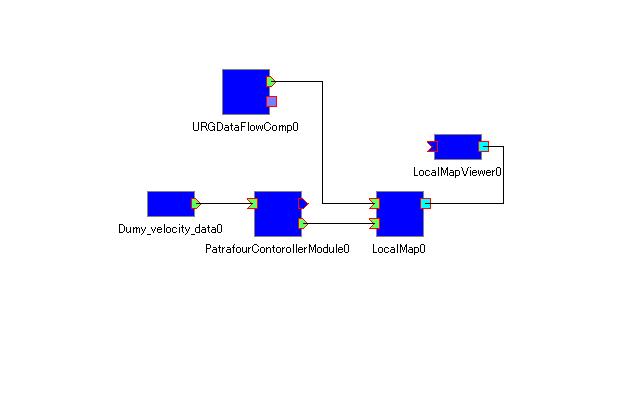
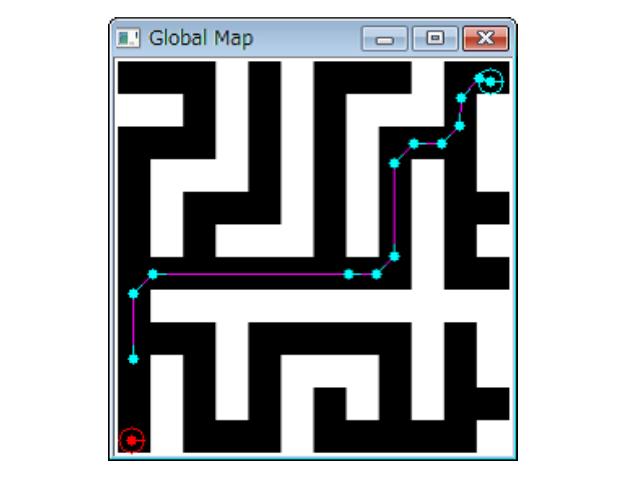
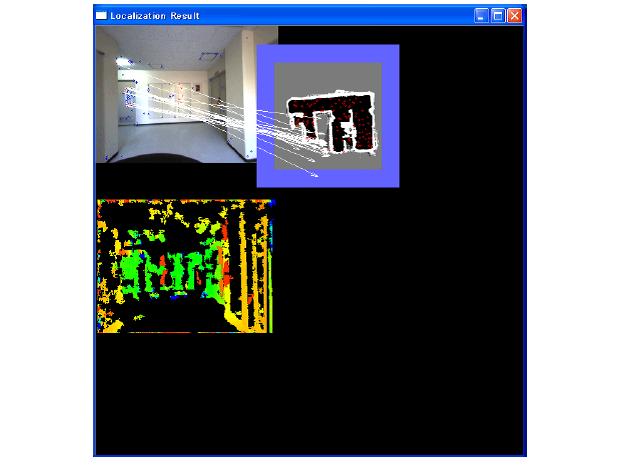
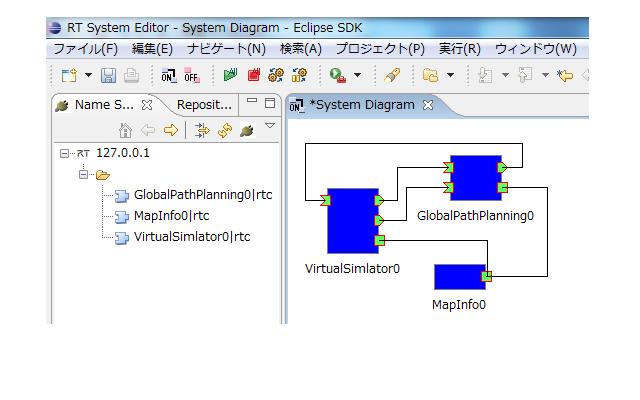
車輪型移動ロボットによる目的地走行RTC群
概要
車輪型移動ロボット(評価機 beego)を利用して自律的に目的地走行を実現するRTC 群です。このRTC群は、現状ではUbuntu8.10専用であり、
他の環境では動作しませんのでご注意ください。
詳しくは、以下のURLを参照してください。
http://www.roboken.esys.tsukuba.ac.jp/~fsi/
ライセンス
現在はバイナリー版だけの公開であり、知能化プロジェクト内での研究目的です。連絡先
富士ソフト株式会社 ロボット事業グループ 筑波オフィスokamura@fsi.co.jp
〒305-0006 茨城県つくば市天王台1-1-1
筑波大学産学リエゾン共同研究センター306
電話:029-853-7811