



ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
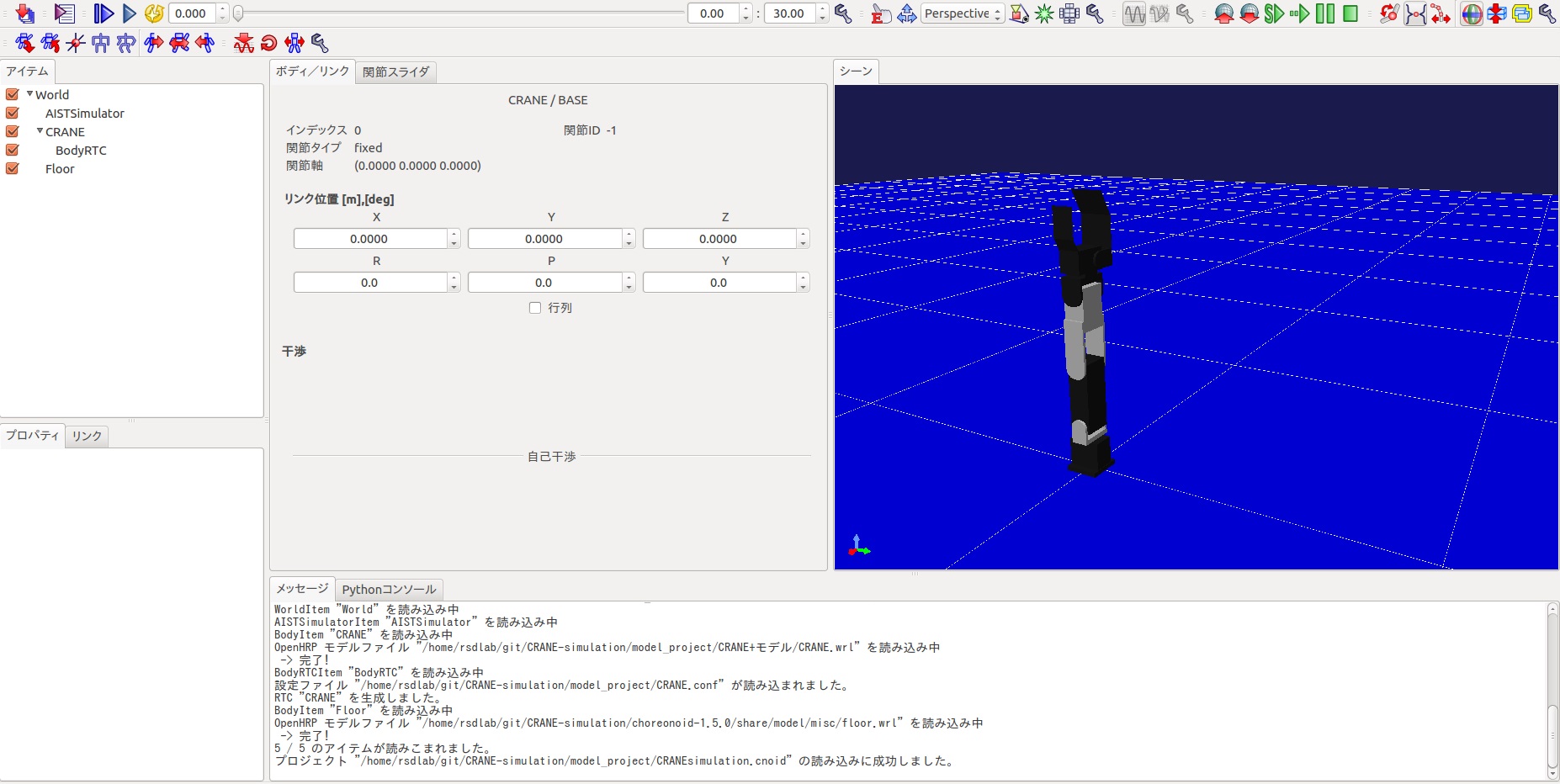
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
Kartoライブラリを用いた自律地図生成システム
本ページはRTミドルウェアコンテスト2013で発表予定のRTCページです。
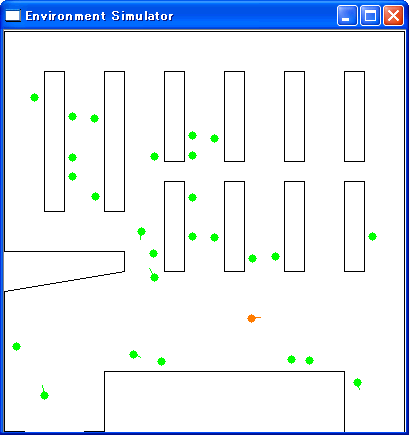
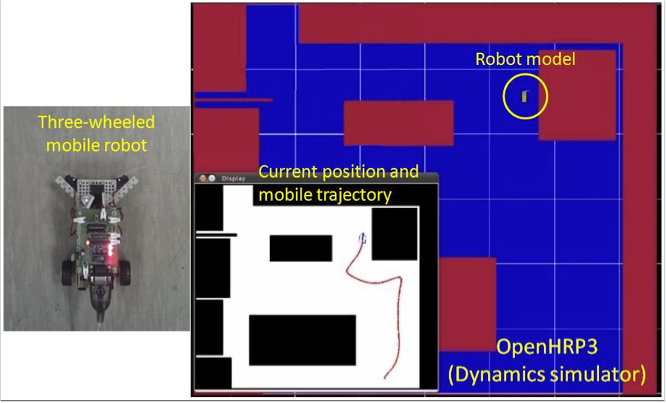
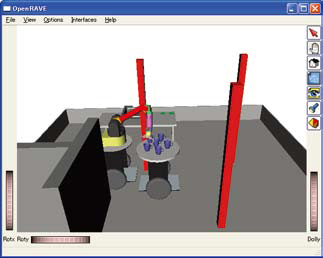
レーザーレンジファインダを搭載した移動ロボット(Roomba)を用いて、自律的に地図を作るシステムを提供します。
このRTC群は、Kartoライブラリを用いたSLAMや経路計画、自己位置推定などの環境地図RTCと、北陽電気のレーザーレンジファインダ、iRobot社のRoombaを制御するRTCが含まれています。
地図システムのコンポーネント群全体について、再利用性を高めるため、データポートを使用し、標準の構造体を使用して設計・構成しています。
そのため、標準のデータ型を使用すれば、一部RTCを置き換える事も可能です。
仕様
必要ライブラリ