


ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
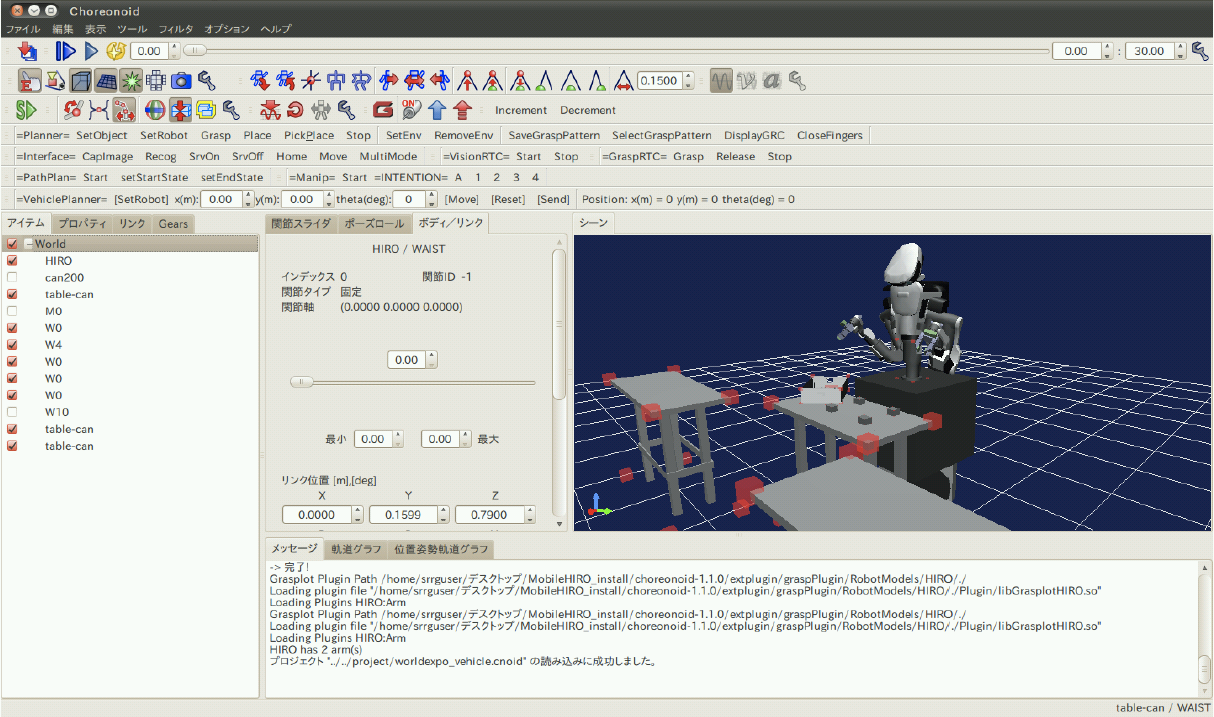
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
洞窟の3次元点群を用いた図面化システムのRTコンポーネント開発
目的
洞窟での測量は,地理学や地質学的な観点から重要なタスクの一つであり,センサ技術を利用したデジタル化が望まれている一分野である.特に,3 次元距離計測は洞窟内の地図構築や洞窟の形状把握が可能となるため,小型化された計測システムと解析技術の発展が望まれている.そこで本研究では,昨年作成した測量システムを拡張し,洞窟で計測された3次元点群データをもとに図面化するシステムを RT コンポーネント(RTC)により開発することで,容易に洞窟の図面化が可能となるシステムの有効性を示すコンポーネント群である.