ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
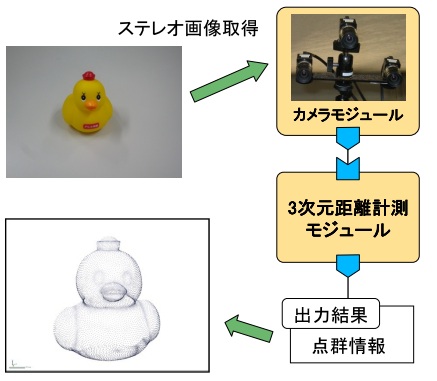
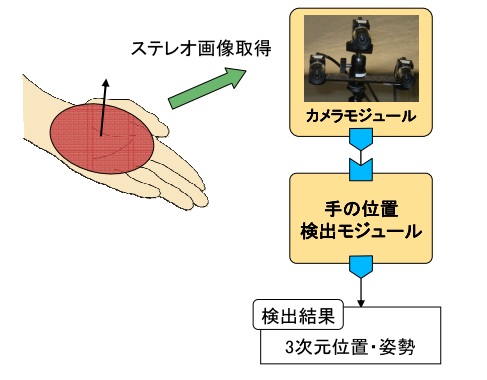
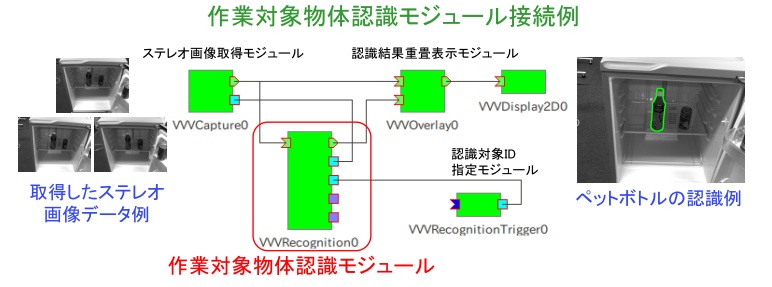
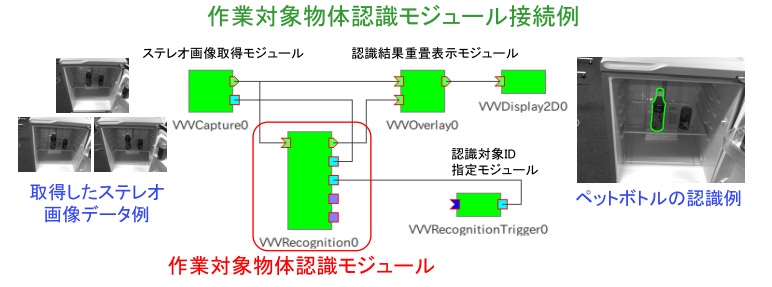
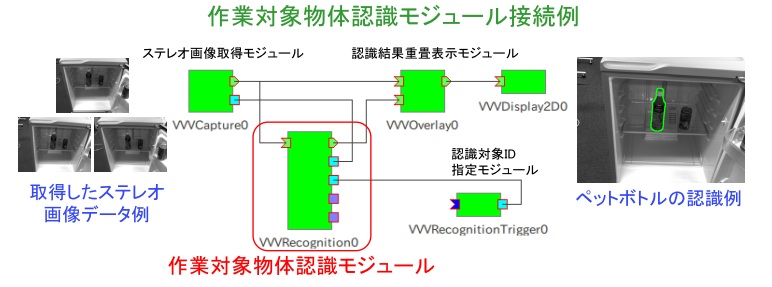
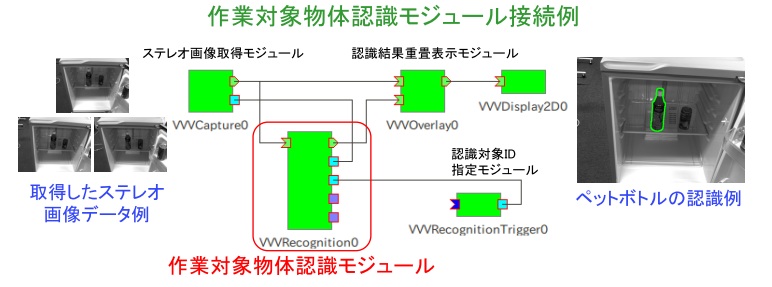
3次元運動認識モジュール
概要
共通認識形式データで対象のモデルと初期姿勢を与えると、それを基に対象を
追跡し3次元位置・姿勢を連続的に出力するモジュールです。
注意事項
利用に際しては対象物体に関する高機能3次元視覚システムVVVの
モデルデータが必要になります。
詳細に関しましてはお問い合わせ下さい。
ライセンス
実行ファイルを有償でご提供させて頂きます。
詳しくは、下記へご相談ください。
連絡先
独立行政法人 産業技術総合研究所
知能システム研究部門 タスクビジョン研究グループ
〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二
email:irtsp-vvv@m.aist.go.jp