


ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
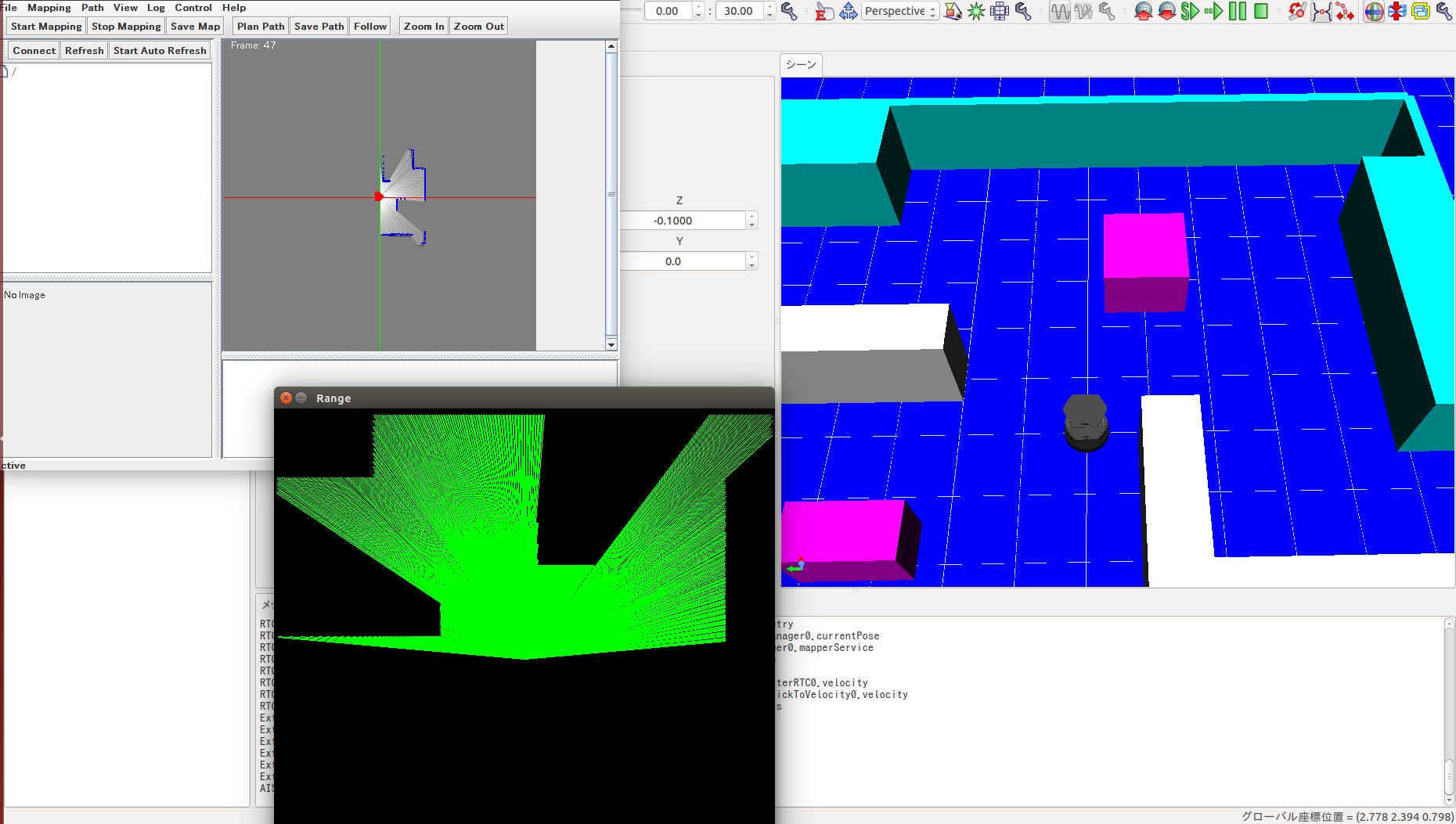
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
自撮りロボ
概要
特徴
仕様
コンポーネント群
新規作成