RT-Middleware
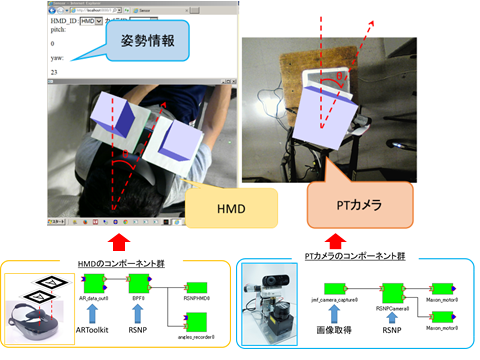
HMD(Head Mounted Display)を使用した(Pan-Tilt)カメラの遠隔操作に関するRTCを公開する。 HMDにマーカを取り付け,それをARToolkit(拡張現実アプリケーション)を使用して姿勢を計測する。そして、得られた姿勢データをRSNP(Robot Service Network Protocol)を使用し、サーバを通してPTカメラへ送信する。これによりHMDの動きに合わせてPTカメラが動作するようになる。このRTC群によりPTカメラを感覚的に操作することが可能となる。
私たちはヒューマノイドの開発環境をRTM上に実装しました。 近年ホビーロボットや研究用途の小型ヒューマノイドの販売・自主製作が増えています。これらのロボット間にはシステムの互換性はなく、データの共用化などは全く進んでおりません。 そこで私たちは、各ロボット間で共用可能なプラットフォームをRTM上で実装しました。ここでは開発したRTCの適用例を示し、用いるコンポーネントを配布します。
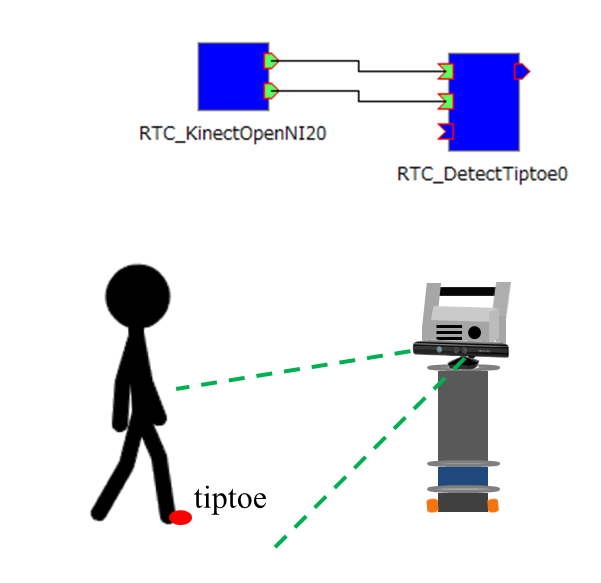
RTCをインターネットに公開するためのRSNP Gateway RTCを当研究室で昨年開発したが、1.AR(Argument Reality)サービス以外への展開、2.ARサービス以外に適用する際の通信速度向上及び、3.Visionモジュール以外での接続を課題としている。適用範囲を拡大するための解決方法として、KinectをRSNP Gateway RTCに接続するKinectRTCに着目、ジェスチャーを使ったオンラインドキュメントサービス(手の位置情報を用いて複数人同時の編集を可能にするサービス)の考案を試みた。また、配信型通信方式の実装により、ストレスを感じさせない通信速度を確保し、通信速度の向上を試みた。さらに、公開済のKinectRTCにおける座標の取得範囲が全身をカバーするものであり、手の座標取得が安定しないこと、手のモーション入力が実装されていないため 、RSNP Gateway RTCに接続する新たなKinectRTC開発を試みた。 これにより、全身および腕によるモーションでの入力インターフェースを増やし、これまでターゲットにならなかったユーザ層及び、新規分野へアプローチを試みた。
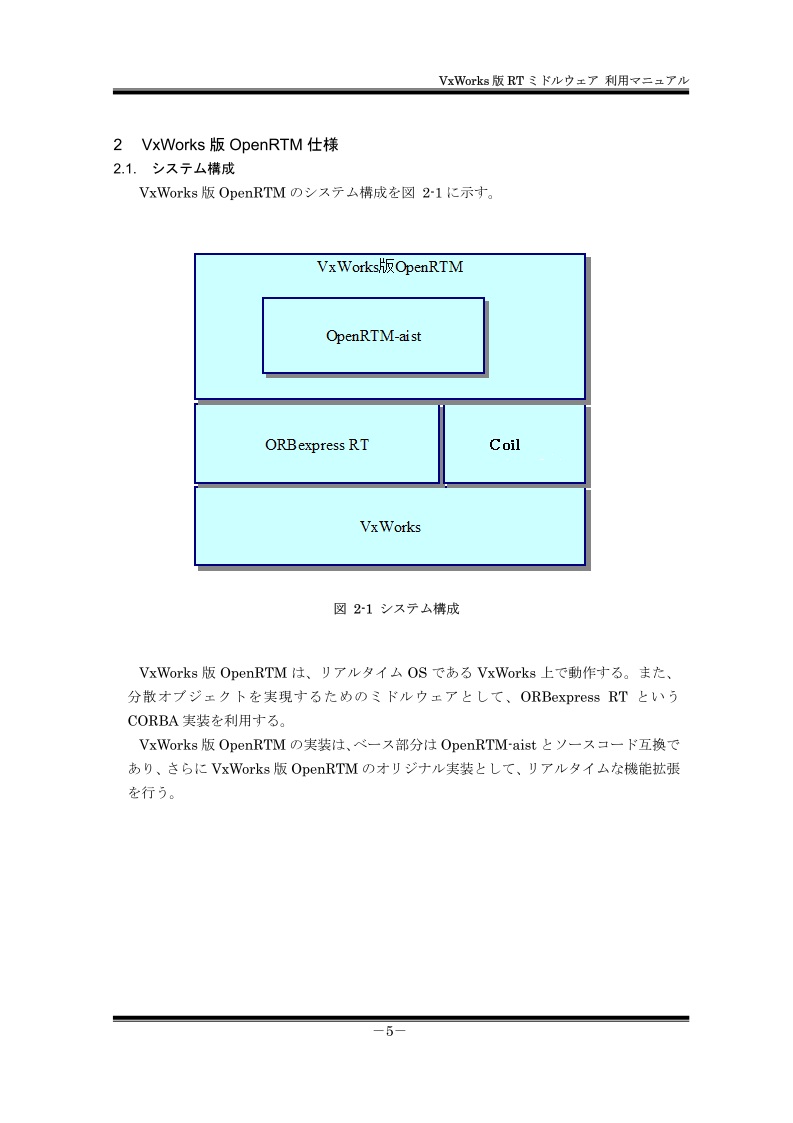
・OpenRTM-aist-C++をリアルタイムOSであるVxWorks上に移植 ・有償のCORBA実装であるORBexpress RTを利用 ・VxWorks5.5.1、VxWorks6.4に対応
利用にあたっては、H/W, S/W に応じた利用手順がありますので まずは株式会社セックまでご連絡下さい。
EPLにて公開予定です。 詳しくは、下記までご連絡をお願い致します。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
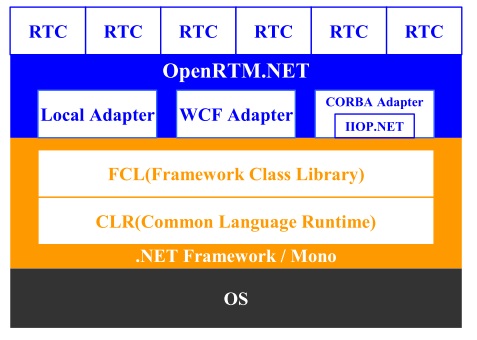
OpenRTM.NETは、Microsoft .NET Framework上で動作するRTミドルウェア実装です。 OpenRTM.NETは以下のような特長を持っています。
PyRTSeamは、RTコンポーネント(RTC)を容易に開発するためのライブラリです。 独立行政法人産業技術総合研究所が開発したRTミドルウェア実装である OpenRTM-aist-Python上で動作します。 PyRTSeamを利用すると、RTCのソースコードが従来よりも簡潔になり、 可読性が向上します。 これにより、RTCの開発効率、保守性が向上します。
MITライセンスを適用しています。
弊社の自社サイトで公開しています。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



家電の電源状態を検出してON/OFFを制御する赤外線リモコン
概要・特徴
仕様