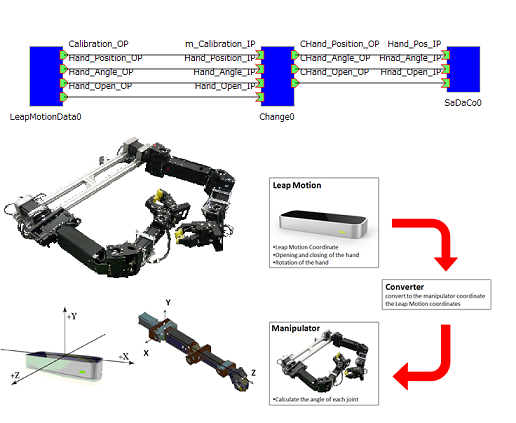
私たちはヒューマノイドの開発環境をRTM上に実装しました。 近年ホビーロボットや研究用途の小型ヒューマノイドの販売・自主製作が増えています。これらのロボット間にはシステムの互換性はなく、データの共用化などは全く進んでおりません。 そこで私たちは、各ロボット間で共用可能なプラットフォームをRTM上で実装しました。ここでは開発したRTCの適用例を示し、用いるコンポーネントを配布します。
RTCをインターネットに公開するためのRSNP Gateway RTCを当研究室で昨年開発したが、1.AR(Argument Reality)サービス以外への展開、2.ARサービス以外に適用する際の通信速度向上及び、3.Visionモジュール以外での接続を課題としている。適用範囲を拡大するための解決方法として、KinectをRSNP Gateway RTCに接続するKinectRTCに着目、ジェスチャーを使ったオンラインドキュメントサービス(手の位置情報を用いて複数人同時の編集を可能にするサービス)の考案を試みた。また、配信型通信方式の実装により、ストレスを感じさせない通信速度を確保し、通信速度の向上を試みた。さらに、公開済のKinectRTCにおける座標の取得範囲が全身をカバーするものであり、手の座標取得が安定しないこと、手のモーション入力が実装されていないため 、RSNP Gateway RTCに接続する新たなKinectRTC開発を試みた。 これにより、全身および腕によるモーションでの入力インターフェースを増やし、これまでターゲットにならなかったユーザ層及び、新規分野へアプローチを試みた。
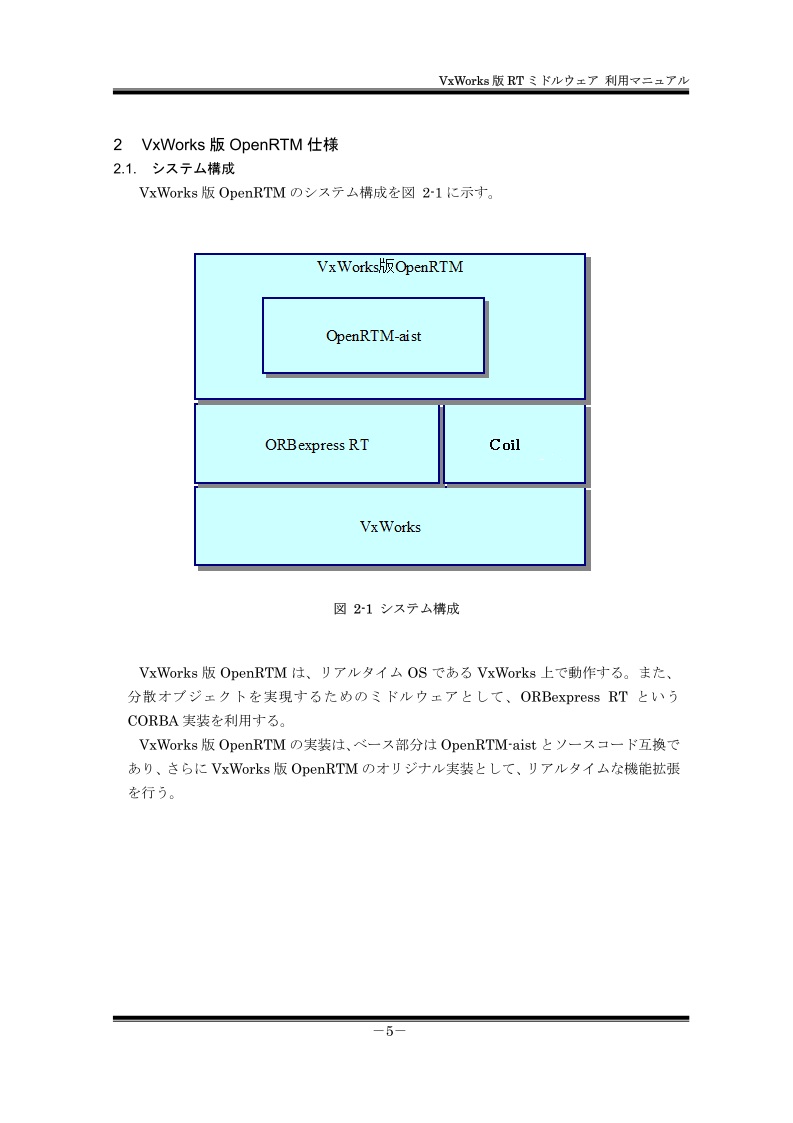
・OpenRTM-aist-C++をリアルタイムOSであるVxWorks上に移植 ・有償のCORBA実装であるORBexpress RTを利用 ・VxWorks5.5.1、VxWorks6.4に対応
利用にあたっては、H/W, S/W に応じた利用手順がありますので まずは株式会社セックまでご連絡下さい。
EPLにて公開予定です。 詳しくは、下記までご連絡をお願い致します。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
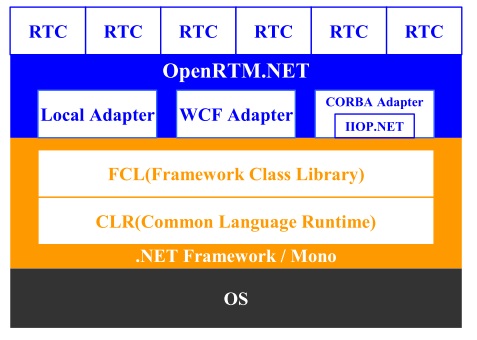
OpenRTM.NETは、Microsoft .NET Framework上で動作するRTミドルウェア実装です。 OpenRTM.NETは以下のような特長を持っています。
本研究では移植性の高いコンポーネントを実現する手段として、LLVMの中間コードを用いたコンポーネントマネージャ(ポータブルコンポーネントマネージャ)の実装を行う。LLVMはよく知られたJava仮想マシン(JVM)とは異なり、より機械語に近い中間コードを用いるコンパイラ技術である。ポータブルコンポーネントマネージャは、C++を用いたコンポーネントのソースコードからLLVMの中間コードを生成し、実行時に中間コードを各プロセッサに適した機械語に変換することで従来と変わらないコンポーネントの実行速度を確保しつつ高い移植性を実現することができる。Linux(x86), Linux(ARM), Windowsの各アーキテクチャで同一の中間コードを動作させる例を示すと共に、リアルタイム性に関する初期の分析結果を示す。
基盤ロボット技術活用型オープンイノベーション促進プロジェクトにて開発した組込み向け軽量RTミドルウェアです。
UNDER CONSTRUCTION ...
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




ロボットとインタラクションを行うためのつま先の位置推定コンポーネント
概要
仕様
コンポーネント群
ソースコード