

ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
RTC Scenario Editor & Player
概要
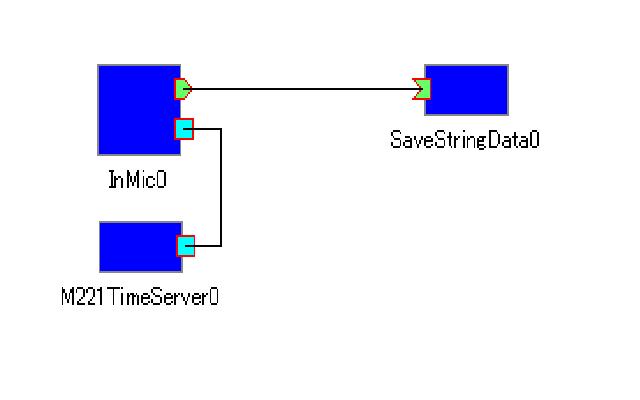
シナリオは専用スクリプト言語を使って、コンポーネントの振る舞いを記述したものです。シナリオプレーヤはアプリケーション実行系で、複数コンポーネントの司令塔の役割を果たします。具体的には他のコンポーネントから様々なメッセージを受け取り、その結果他のコンポーネントにメッセージを送出することで、複数のコンポーネントを連携動作させることができます。
シナリオを作成するためのツールとしてシナリオエディタを提供します。コンポーネントの動作や条件判断などの各処理を箱のように見える「部品」として定義し、それらを接続していくことで簡単にアプリケーションを作成することが出来ます。
注意事項
下記ライブラリを利用しています。
log4j-1.2.8.jar
ライセンス
Eclipse Public License - Version 1.0
連絡先
日本電気株式会社 robot@rtp.jp.nec.com