ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
HIRO-AGV統合制御モジュール
概要
AGVによる部品運搬とHIROによる物体操作の実行順序を制御して
連携作業を行うモジュール
2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。
2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
注意事項
下記ライブラリを使用しています。
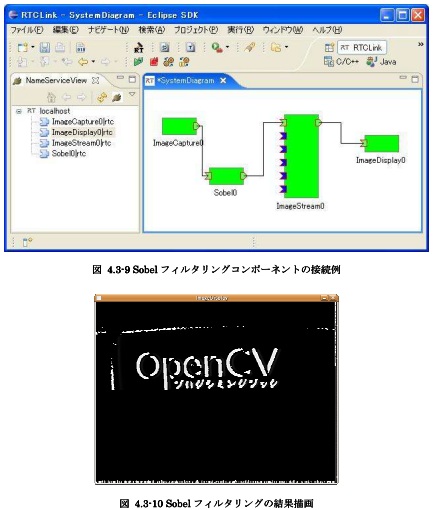
●OpenCV 2.1
ライセンス
修正BSDライセンスを適用しています。
連絡先
国立大学法人 豊橋技術科学大学
行動知能システム学研究室
〒441-8580 豊橋市天伯町雲雀ヶ丘1-1
email: rtc@aisl.cs.tut.ac.jp