私たちは各行でロボットの動きの種類とそれのパラメータが含まれるモーションスクリプトを取得し,処理する一つのRTコンポーネントを提案します.本モーションスクリプトは人間にサービスを提供するようHRP-4を制御するために使用する.モーションスクリプトの行は任意の逆運動学の解とモーションプランナーで求められる解法から得られる.実験ではボトルからグラスに水を注ぎ,人に手渡す簡単なサービスを行う.
OMG において標準化が進められているロボットサービスアプリケーションとHRI(Human Robot Interaction)機能コンポーネント間の共通インタフェース(メッセージ交換)の枠組みである Robotic Interaction Service (RoIS) Framework に基づくメッセージ交換機能を実現するミドルウェア、RTコンポーネントをRoIS FrameworkにおけるHRI機能コンポーネントとして利用するための接続アダプタ、接続アダプタを用いたサンプルプログラムを提供する。
近年,ロボット技術や情報技術の発展により,ロボットは産業分野だけにとどまらず,私たちの生活に密に係わる予想される.今までロボットの操作は特別な訓練を受けた人が主であったが,今後社会においてより多くの人々がロボットの操作を行う可能性があるため,今後のロボットには直感的かつ容易な操作方法が望まれる.そこで,人とロボットとのインタラクティブな意思疎通により操作を容易にする研究を行っている.インタラクティブな意思疎通の方法の1つとして指差しに着目し,直感的に物体の位置情報やロボットの移動経路などの入力を行うためのコンポーネントを開発した.
本ページは作成途中です.
本ページはRTMコンテスト2011にて発表予定のRTコンポーネントのページです.視覚トラッキングによるクァッドロータの誘導を目的として開発中のRTコンポーネント群を公開します.ビジョンシステムは複数のカメラにより構成し,映像を複数のRTコンポーネントにより処理します.RTコンポーネント間の画像の受け渡しをデータポートにより行うと遅延が顕著となる問題に対し,処理速度を改善する目的で共有メモリを使用して画像の受け渡しを 行います。
共有メモリを使用して画像の受け渡しを行うには、RTコンポーネント間で共有メモリセグメントおよびそのセグメント上の画像の識別名を 受信側のRTコンポーネントが知る必要があります。これにはサービスポートを利用して、送信側から受信側に識別名を通知します。
RT-Middlewareによるコンポーネント指向ロボット開発により、ロボットモデル、低レベルのコンポーネント、高レベルのコントローラコンポーネントなど、以前より明確にロボット開発の役割を分担することが可能になった。この分担されたコンポーネント指向による開発作業において重要なのは、自分が集中すべき、得意な役割以外は、気にすること無く研究・開発が可能な点である。本ツールは、モデルの骨組みや抽象動作パターン、クラウドなどの概念を利用することでロボットシステムの分担された各工程をより独立・再利用化し、それぞれの研究・開発を促進するアプローチ方法、及びそれらを機能的、視覚的にサポートするツールを提供する。
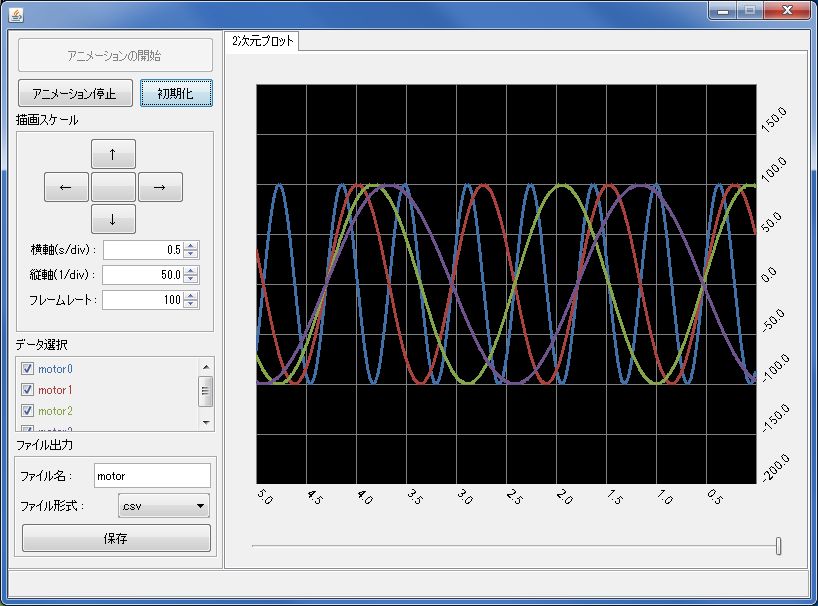
モーションエディタ/シミュレータ
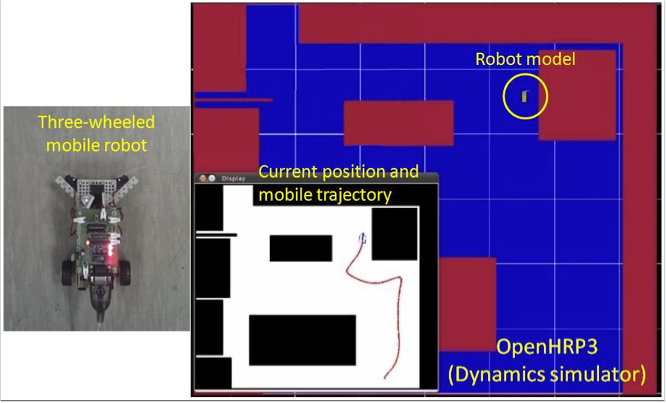
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




家電制御用電源タップ型デバイス“RTタップ”: RTタップ用家電機器設定・操作RTC群
概要