全方位移動搭乗型ロボットを制御するためのコンポーネントです。 主な機能としては、速度指令を入力として搭乗型ロボットをその速度指令通り 走行するように制御します。 また、デットレコリングにより自己位置を出力します。 ドキュメントは、モジュール本体ファイルに含まれています。
・オープンソースにて公開 ・PeakSystem社CAN-USBインターフェースに対応 ・Ubuntu 10.04に対応
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
PosixRealTimeExecutionContextは、Posixライブラリと 標準Linuxリアルタイム機能を利用したリアルタイム対応 実行コンテキストです。 rtc.confのexec_cxt.periodic.rate:で指定した周期で 精度よいRTCの周期実行が可能になります。 ソースを公開していますので、Ubuntu以外のLinuxでも 利用いただけます。 ドキュメントは、モジュール本体ファイルに含まれています。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
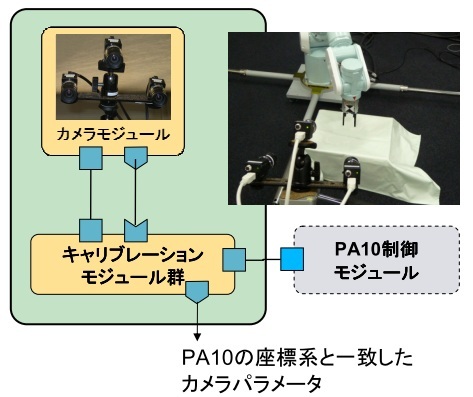
PA10のアームに添付したマーカを環境に固定したカメラで観測することで カメラのキャリブレーションとPA10-カメラ間の座標の一致を同時に行います。
※本RTC群の動作にはステレオ画像取得RTCが必要です。 別途ご用意願います。
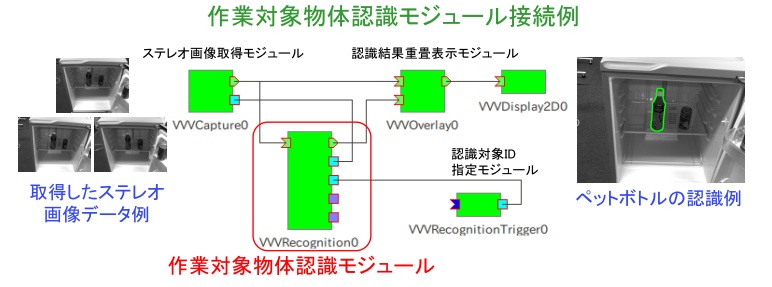
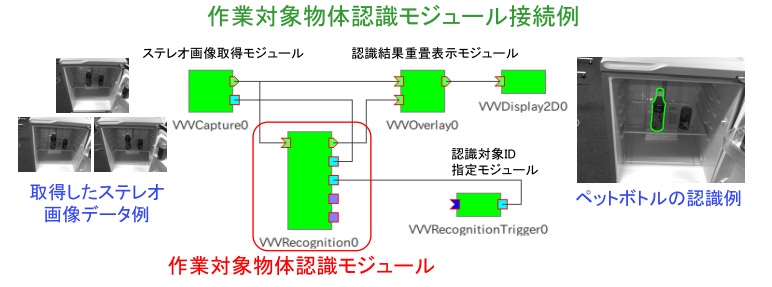
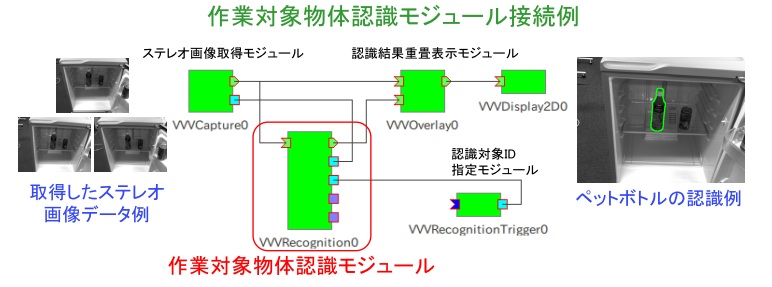
利用に際しては対象物体に関する高機能3次元視覚システムVVVの モデルデータが必要になります。 詳細に関しましてはお問い合わせ下さい。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
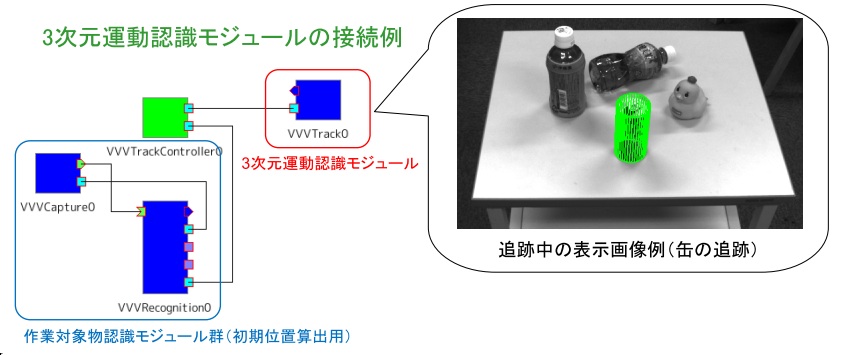
共通認識形式データで対象のモデルと初期姿勢を与えると、それを基に対象を 追跡し3次元位置・姿勢を連続的に出力するモジュールです。
独立行政法人 産業技術総合研究所 知能システム研究部門 タスクビジョン研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 email:irtsp-vvv@m.aist.go.jp
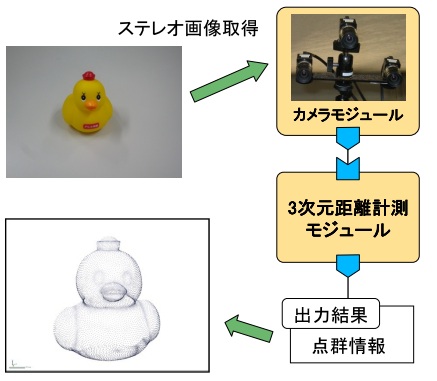
入力されたステレオ画像を処理し、3次元位置や色などの 情報を持つ点群データを出力するモジュールです。
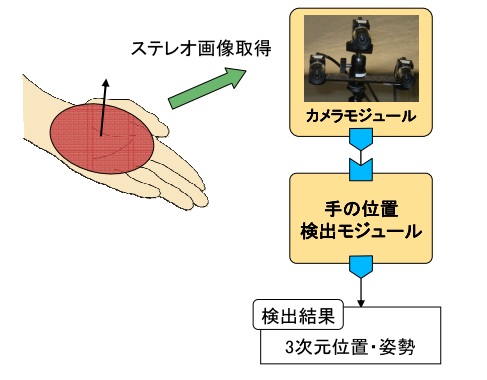
入力されたステレオ画像を処理し、手のひらのような物体を置ける面の 3次元位置と傾きを出力するモジュールです。
EPBM形式画像データをディスプレイに表示するモジュールです。
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 認識結果の重畳表示RTC
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。 詳細に関しましては下記へお問い合わせ下さい。
産業技術総合研究所が開発している3次元物体の認識機能を応用し 指定された対象物体の位置・姿勢を共通形式で出力するモジュール群です。
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 画像データの表示RTC
関連モジュール ステレオ画像取得RTC 認識結果の重畳表示RTC 画像データの表示RTC
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
(オープンソース)全方位移動搭乗型ロボット制御コンポーネント
概要
全方位移動搭乗型ロボットを制御するためのコンポーネントです。
主な機能としては、速度指令を入力として搭乗型ロボットをその速度指令通り
走行するように制御します。
また、デットレコリングにより自己位置を出力します。
ドキュメントは、モジュール本体ファイルに含まれています。
・オープンソースにて公開
・PeakSystem社CAN-USBインターフェースに対応
・Ubuntu 10.04に対応
ライセンス
EPL 1.0
連絡先
千葉工業大学
未来ロボット技術研究センター(furo)
http://www.furo.org/
email:info@furo.org