ロボットの教示作業をカメラ画像を見ながら対話的に行う用途を想定し 画面上での視認性を向上させるためのエッジ強調処理、コントラスト変換 などの画像処理を行います。 入力されたビットマップ画像に対して、画像変換処理を行い、その結果 画像(ビットマップ)を出力するモジュールです。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
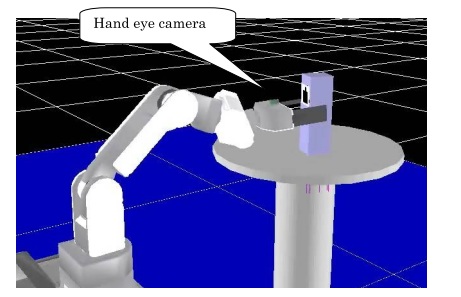
本モジュールは、ハンド・アイ・カメラを搭載したロボットアームに ビジュアルフィードバック動作を行わせるために開発したものである。 ハンド・アイ・カメラで撮影したマーカの画像を基に、マーカの 位置姿勢を算出するRTC「単眼位置姿勢計測・表示モジュール 」がある。 本モジュールは、このモジュールと接続することにより、マーカの位置 姿勢情報を受け、マーカに近づくためのアーム関節角(速度)を算出する ものである。
詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
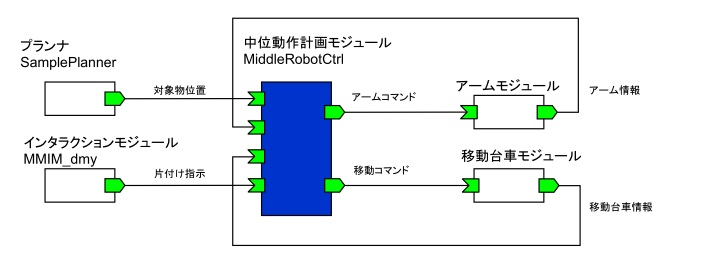
カメラなどで取得した対象物の位置情報を入力すると アームの目標位置列を順に出力するモジュール。
EPL 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:junichiro.ohga@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
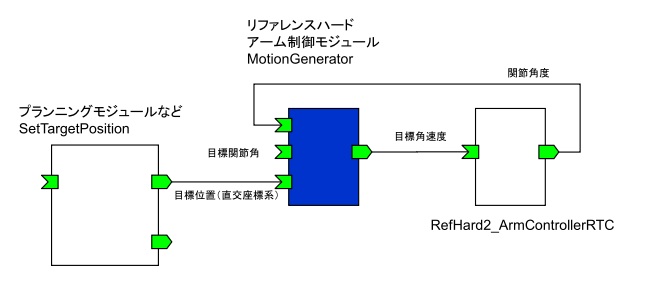
ファレンスハードウェアのアームを制御するためのモジュール。 目標位置もしくは目標関節角度を入力すると,関節角速度指令を出力する。
リファレンスハード3号機の台車を位置制御するモジュール。 地図データや外界センサなしで手軽に位置制御を実行できる。 このモジュールはノンホロノミック台車に再利用できる。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:rie.katsuki@toshiba.co.jp
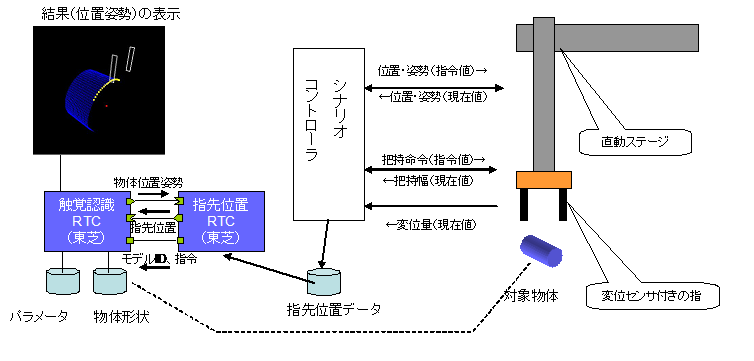
触覚認識モジュールは、変位センサを装備したロボットハンドで 物体(スプーン、缶など)の部分的な形状を測定し、予め登録した 形状データと照合し、その物体の重心位置・姿勢を算出するもの である。
バイナリー提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
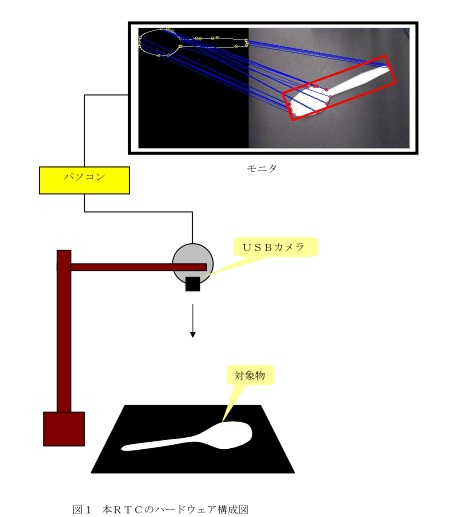
コンポーネントは、共通Sense I/F※を備えた画像認識コンポーネントで カメラで物体(スプーン、ナイフなど)の部分エッジ(曲線)を検出し 予め登録した曲線と照合して、その物体の重心位置・姿勢を算出するものである。
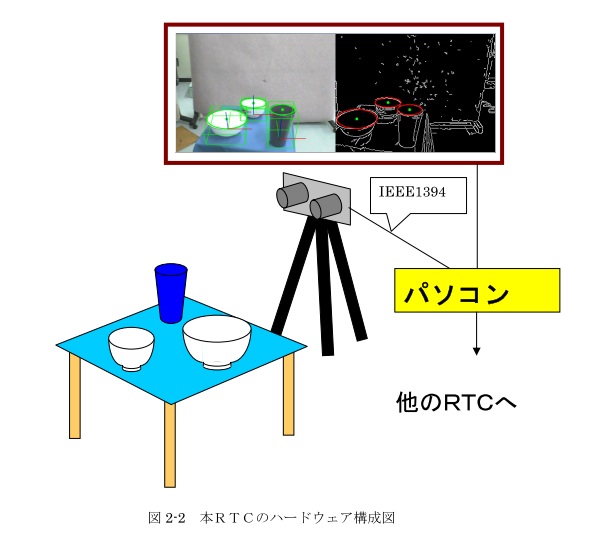
本コンポーネントは、共通Sense I/Fを備えた画像認識コンポーネントで ステレオカメラで物体(皿やコップ)の円弧(楕円)を検出し 予め登録した半径データと照合して、その位置・姿勢を算出するものである。 同時に複数の楕円を認識でき、算出した位置・姿勢をワイヤーフレームで 実写画像に重畳して表示することができる。
バイナリーを無償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
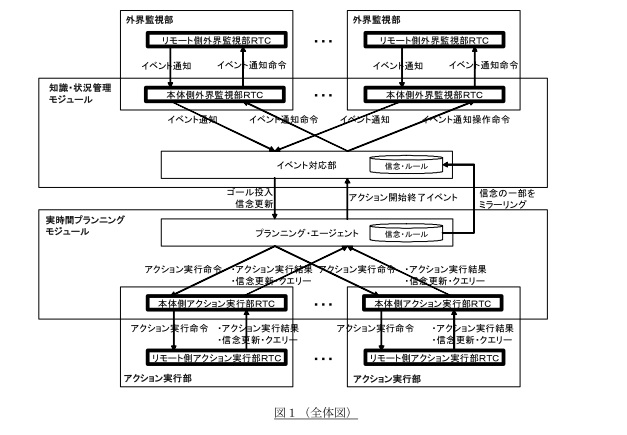
イベントをトリガにしてプラン(=アクションの列)を作成・修正・実行するモジュールです。 イベントを通知する外界監視部と、アクションを実行するアクション実行部を本モジュールに RTM接続して用います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:hisashi3.hayashi@toshiba.co.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

ハイブリッド視覚補正(2D)
概要
ロボットの教示作業をカメラ画像を見ながら対話的に行う用途を想定し
画面上での視認性を向上させるためのエッジ強調処理、コントラスト変換
などの画像処理を行います。
入力されたビットマップ画像に対して、画像変換処理を行い、その結果
画像(ビットマップ)を出力するモジュールです。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しい内容については、下記へご連絡願います。