



ダウンロード
最新バージョン : 2.0.2-RELESE
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM@Github
OpenRTM-aist GitHubサイト
ROS
Robot Operating System
Choreonoid
モーションエディタ/シミュレータ
DAQ-Middleware
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
| 2.0.2-RELESE | ダウンロードページ |
OpenRTM-aist GitHubサイト
Robot Operating System
モーションエディタ/シミュレータ
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
産総研が提供するRTC集
東京オープンソースロボティクス協会
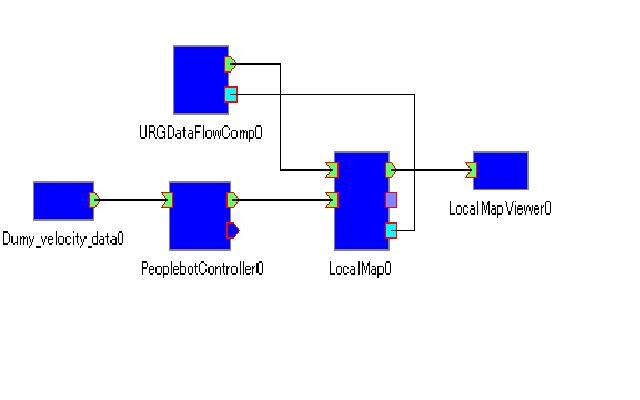
Classic-URG RTC (北陽電機社製:URG-04LX)
概要
北陽電機社製の距離センサClassic-URG(URG-04LX)のRTC。
実行バイナリとマニュアルのみの配布。
独自定義のIDLによりデータポートとサービスポートを規定。
注意事項
Ubuntu
InterfaceGuidelineに準拠したデータポートを追加。
Windows
ACEをcoilに、ロガーをlog4cxxからOpenRTM標準のロガーに変更しました。
InterfaceGuidelineに準拠したデータポートを追加。
OpenRTM.NET
set系のサービスには未対応。
OpenRTM.NET-1.2.1に対応。
ライセンス
非営利・非商用での利用に限り、バイナリーファイルにて
無償公開にしています。
商用利用やソースコードの提供に関しましては
下記へご相談ください。