ロボットアームなどのマニュピュレーションを行うオープンソースであるOpenRAVEに機能をRTC経由で利用することができる。
Eclipse Public License - Version 1.0
※ OpenINVENTの開発は、ver4.0.0をもって終了いたしました。
車輪型移動ロボットが自律的に目的地まで移動できるためには、目的地までの経路を計画し、その経路にそって走行するために車輪の回転を制御し、センサを使って周囲の状況を観測し、自身がどこにいるのかを推定するなどの機能をもつRTC群です。
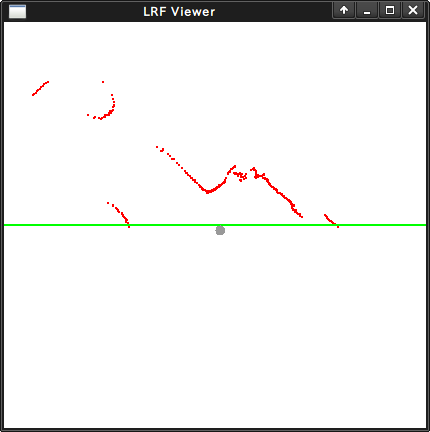
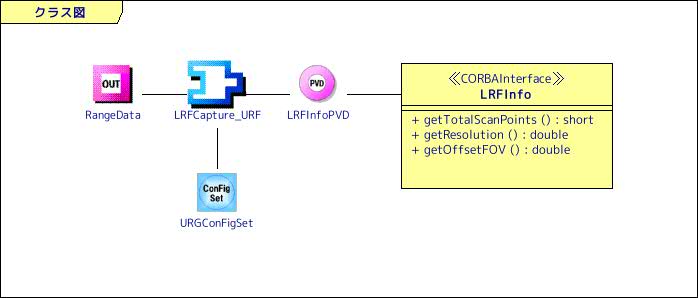
これはLRF描画コンポーネントです。 LRFキャプチャRTCからの距離データを受け取り描画を行います。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

RTC-OpenRAVE
概要
ロボットアームなどのマニュピュレーションを行うオープンソースであるOpenRAVEに機能をRTC経由で利用することができる。
特徴
ライセンス
Eclipse Public License - Version 1.0