Realization of High-performance Roomba by combining ROS and RTM
Realization of High-performance Roomba by combining ROS and RTM
投稿日時:
月, 2012-11-19 23:14
概要
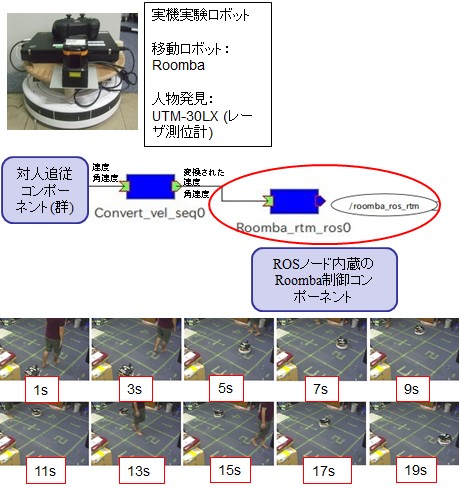
- RTコンポーネント群で算出された速度、角速度をROSノード群を通じて、Roombaに指令
特徴
- RoombaにRTコンポーネント群を実装
- 独自定義型のデータポートに対応
- 様々なRTモジュール群を搭載可能
仕様
- 言語: C++ Python
- OS:Linux(Ubuntu 10.04)
コンポーネント群
- Covert_vel_seq:独自定義型のデータを変換
- Roomba_rtm_ros:Roombaに速度・角速度の指令
ソースコード
問合先(メールアドレス):
hiroshihisahara0125@gmail.com
最終更新日時:
水, 2013-11-27 17:00
コメント
利用方法について
東京大学 矢口です. お世話になっております.
さっそく使わせていただこうと思い, 中身を拝見させていただいたのですが, 外部パッケージについての情報が足りず,動かせておりません. いくつか質問させてください.
まず,利用するROSパッケージは何でしょうか? manifest.xmlを見ましたが otl_roomba というパッケージでしょうか? これはelectric標準にあるものでしょうか? もし別のところからインストールする必要があれば, 教えていただけますか?
次に.「対人追従コンポーネント群」とは, 具体的にどの機関の公開しているどのコンポーネントでしょうか?
最後に,これはコメントですが,
・rosinstallでインストール可能なようにすると rosから扱いやすいように思います.
・またpptの資料はpdfで同梱していただけると linuxだけで完結できてありがたいです.
よろしくお願いします.
環境整備について
栗原と申します。
Ubuntu11.04はサポート対象外かも知れませんが、 ros-electric-desktop-fullのインストールについて情報 共有いたします。
aptにてros-electric-desktop-fullをインストールしようとしたところ、 以下のエラーが発生しました。
# apt-get install ros-electric-desktop-full パッケージリストを読み込んでいます... 完了 依存関係ツリーを作成しています 状態情報を読み取っています... 完了 インストールすることができないパッケージがありました。おそらく、あり得 ない状況を要求したか、(不安定版ディストリビューションを使用しているの であれば) 必要なパッケージがまだ作成されていなかったり Incoming から移 動されていないことが考えられます。 以下の情報がこの問題を解決するために役立つかもしれません: 以下のパッケージには満たせない依存関係があります: ros-electric-desktop-full : 依存: ros-electric-eigen (= 1.6.0-s1336548560~natty) しかし、インストールされようとしていません 依存: ros-electric-geometry-tutorials (= 0.1.3-s1336579729~natty) しかし、インストールされようとしていません 依存: ros-electric-orocos-kinematics-dynamics (= 0.2.3-s1336548597~natty) しかし、インストールされようとしていません 依存: ros-electric-slam-gmapping (= 1.2.5-s1336560713~natty) しかし、インストールされようとしていません 依存: ros-electric-stage (= 1.4.1-s1336574012~natty) しかし、インストールされようとしていません 依存: ros-electric-visualization (= 1.6.7-s1338582813~natty) しかし、インストールされようとしていません 依存: ros-electric-vision-opencv (= 1.6.13-s1336549507~natty) しかし、インストールされようとしていません 依存: ros-electric-perception-pcl (= 1.0.2-s1336550133~natty) しかし、インストールされようとしていません 依存: ros-electric-geometry-experimental (= 0.2.2-s1336561191~natty) しかし、インストールされようとしていません 依存: ros-electric-image-pipeline (= 1.6.4-s1336549903~natty) しかし、インストールされようとしていません 依存: ros-electric-simulator-gazebo (= 1.4.15-s1338539349~natty) しかし、インストールされようとしていません 依存: ros-electric-simulator-stage (= 1.4.0-s1336574648~natty) しかし、インストールされようとしていません 依存: ros-electric-geometry-visualization (= 0.1.1-s1336623697~natty) しかし、インストールされようとしていません 依存: ros-electric-common-tutorials (= 0.1.2-s1336623997~natty) しかし、インストールされようとしていません 依存: ros-electric-image-transport-plugins (= 1.4.2-s1336549611~natty) しかし、インストールされようとしていません 依存: ros-electric-robot-model (= 1.6.4-s1336552234~natty) しかし、インストールされようとしていません 依存: ros-electric-visualization-tutorials (= 0.4.0-s1338600729~natty) しかし、インストールされようとしていません 依存: ros-electric-geometry (= 1.6.1-s1336548757~natty) しかし、インストールされようとしていません 依存: ros-electric-laser-pipeline (= 1.2.1-s1336554385~natty) しかし、インストールされようとしていません 依存: ros-electric-navigation (= 1.6.5-s1336554658~natty) しかし、インストールされようとしていません E: 壊れたパッケージ以下の手順いて、一応ros-electric-desktop-fullのインストールができました。
以上です。
東京理科大学の太田です。お世話になっております。
本コンポーネント群に興味をもって、ダウンロードさせていただきました。
今回は対人追従コンポーネント群ということですが、それだけではもったいない気がします。
Roombaの自律移動機能を活かしたものや、複数の機能を同時に実行できるようなものにも対応できるように改良を加えていくとよいと面ます。
以上です。