Canon社製のNetworkカメラVB-C50iのRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
OpenRTM.NET OpenRTM.NET-1.0, OpenRTM.NET-1.1に対応。
非営利・非商用での利用に限り、バイナリーファイルにて 無償公開にしています。 商用利用やソースコードの提供に関しましては 下記へご相談ください。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
SICK社製のLMS100のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
OpenRTM.NET OpenRTM.NET-1.2.1に対応。
Hemisphere社製のGPSセンサCrescentA100のRTC。 実行バイナリとマニュアルのみの配布。 独自定義のIDLによりデータポートとサービスポートを規定。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
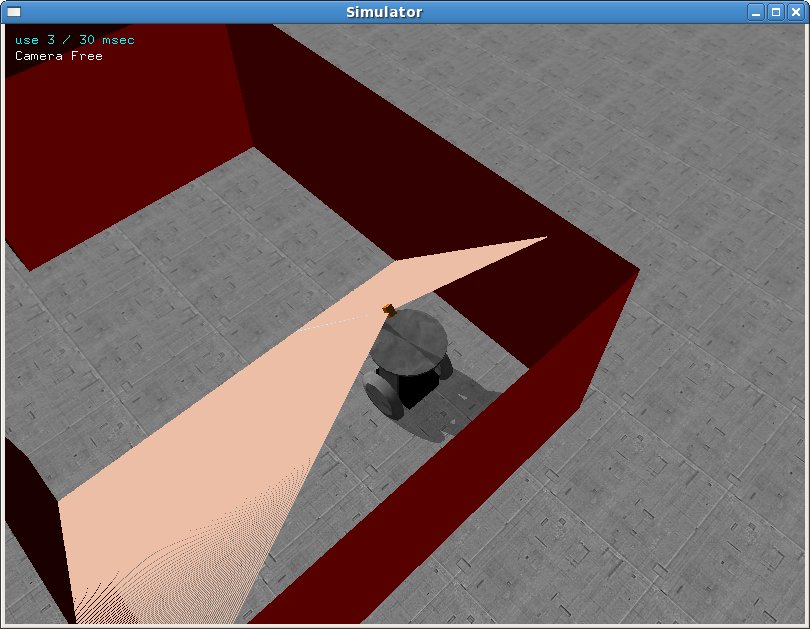
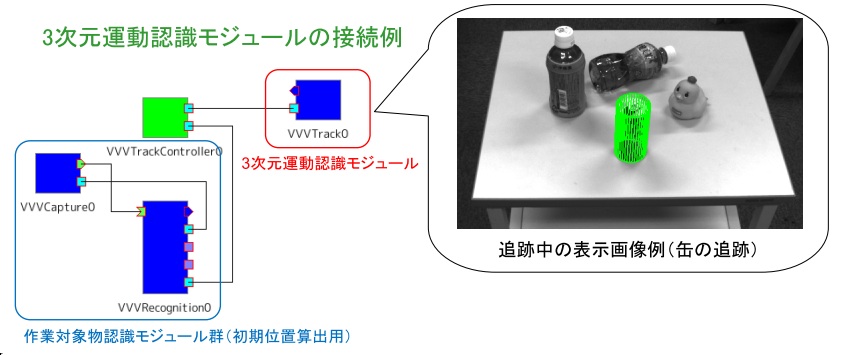
共通認識形式データで対象のモデルと初期姿勢を与えると、それを基に対象を 追跡し3次元位置・姿勢を連続的に出力するモジュールです。
利用に際しては対象物体に関する高機能3次元視覚システムVVVの モデルデータが必要になります。 詳細に関しましてはお問い合わせ下さい。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
独立行政法人 産業技術総合研究所 知能システム研究部門 タスクビジョン研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 email:irtsp-vvv@m.aist.go.jp
移動ロボット用知能モジュール群をオープンソースで公開します。 ドキュメントは、RTモジュールファイル本体に含まれています。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
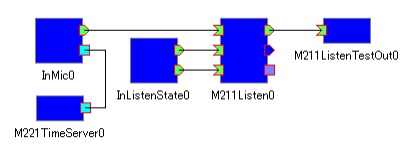
音声認識コンポーネントは入力された音声波形データを認識し 文字列で発話内容を出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
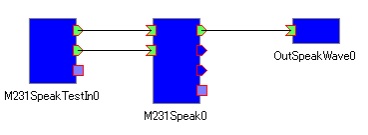
音声合成コンポーネントは入力された文字列から 音声波形ファイルを生成し、出力します。
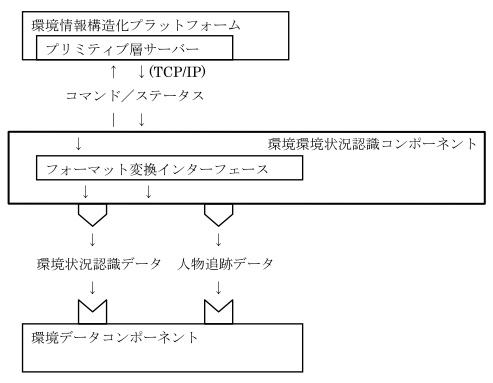
環境情報構造化プラットフォームから得られる、人々とロボットの位置や 「ロボットに近づく」「ロボットから離れる」「ある程度の時間以上ロボットの 近傍にいた人物が離れる」などの状況の認識結果を、外部RTCに出力します。
株式会社 国際電気通信基礎研究所 知能ロボティクス研究所 次世代ロボット知能化プロジェクト担当 〒619-0288 京都府相楽群精華町光台2-2-2 URL :http://www.irc.atr.jp/ptRTM/RTM-j.html email:irc-contact@atr.jp
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


VB-C50i RTC (Canon社製:VB-C50i)
概要
Canon社製のNetworkカメラVB-C50iのRTC。
実行バイナリとマニュアルのみの配布。
独自定義のIDLによりデータポートとサービスポートを規定。
注意事項
OpenRTM.NET
OpenRTM.NET-1.0, OpenRTM.NET-1.1に対応。
ライセンス
非営利・非商用での利用に限り、バイナリーファイルにて
無償公開にしています。
商用利用やソースコードの提供に関しましては
下記へご相談ください。
Download
弊社の自社サイトでの公開を予定しています。
詳しくは、下記へご連絡願います。