本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です. 例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。 ・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
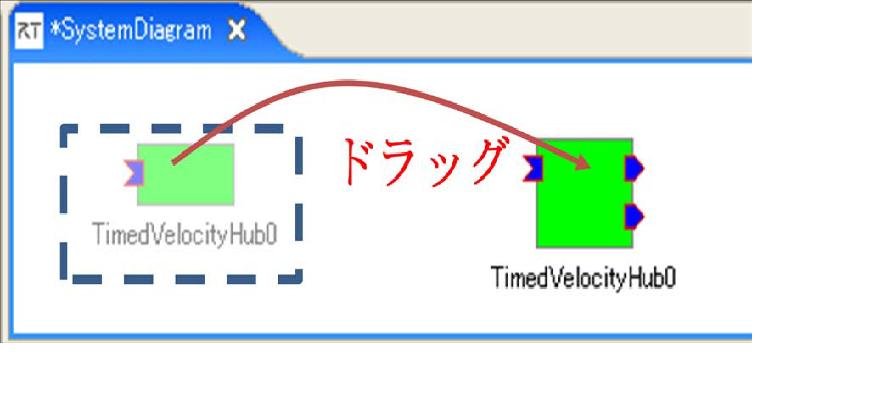
このコンポーネントはTimed Velocity データを複数に分岐するコンポー ネントです。
修正BSDライセンスを適用しています。
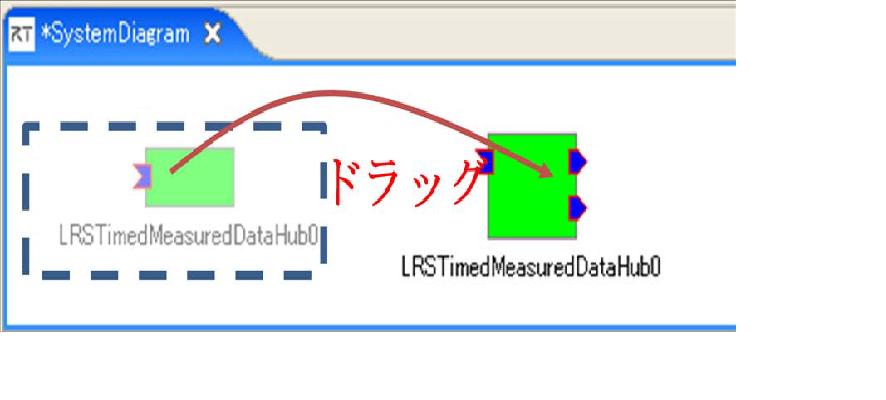
このコンポーネントはLRS Timed Measured Data データを複数に分岐する コンポーネントです。
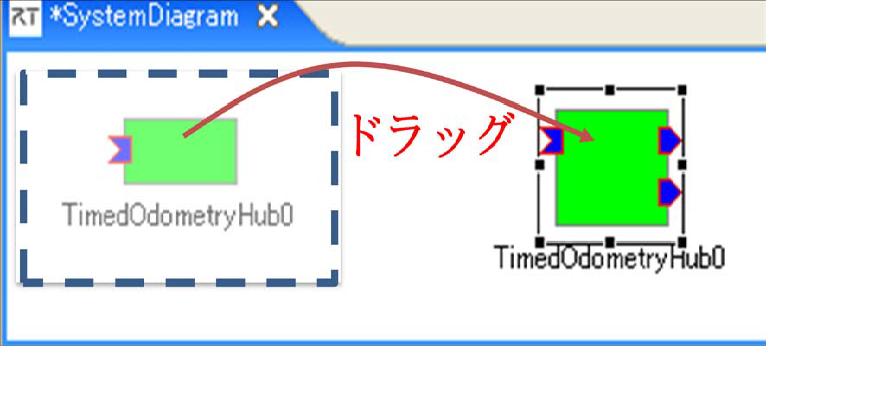
このコンポーネントはTimed Odometry データを複数に分岐するコンポー ネントです。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
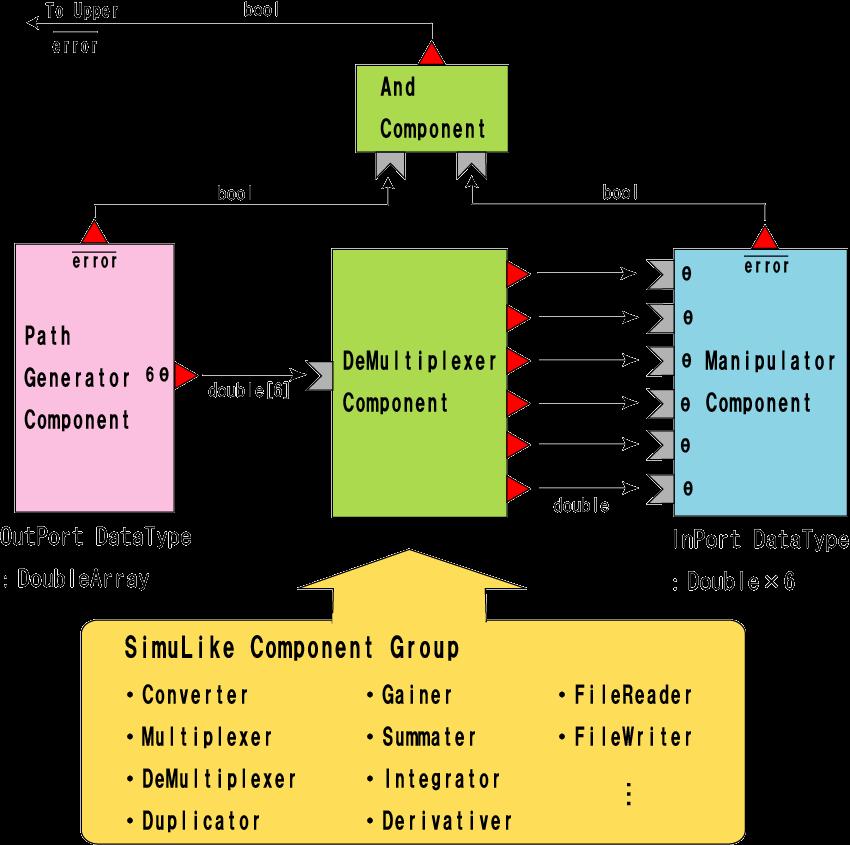
フレキシブルなユーティリティコンポーネント
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
動的システム変更を実現する RTC セット
概要
本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です.
例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。
・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。