修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
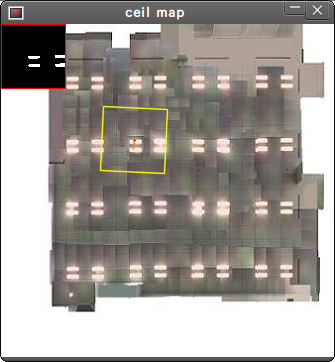
本プログラムはロボットから見える画像と、天井地図のマッチングを常に取ることで自己位置を推定するRTコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.0.0
商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
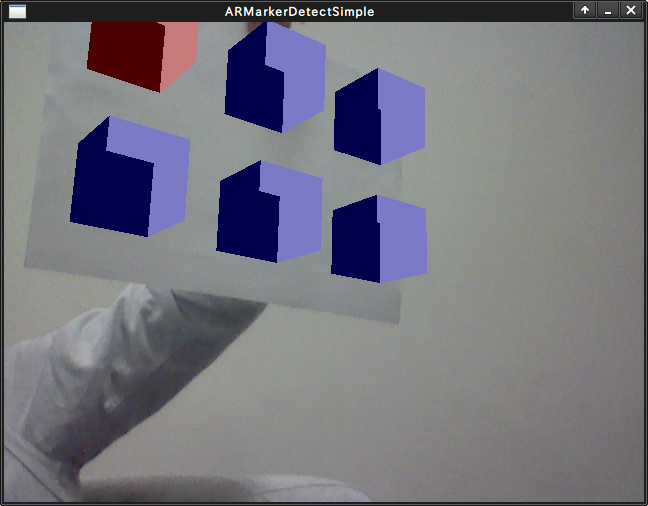
ARTool Kitを利用し、マーカの検出・位置姿勢推定を行うRTC。
下記ライブラリを使用しています。 ●ARTool Kit 2.72.1, OpenGL, GLUT, GLEW, OpenCV 2.0.0
ARTool Kitマーカ検出・位置姿勢推定モジュール 本モジュールのライセンスは、ARTool Kit のライセンス(GPL)に従います。 本モジュールの改変・再配布等については、GPL に従って行ってください。
画像キャプチャコンポーネント 商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
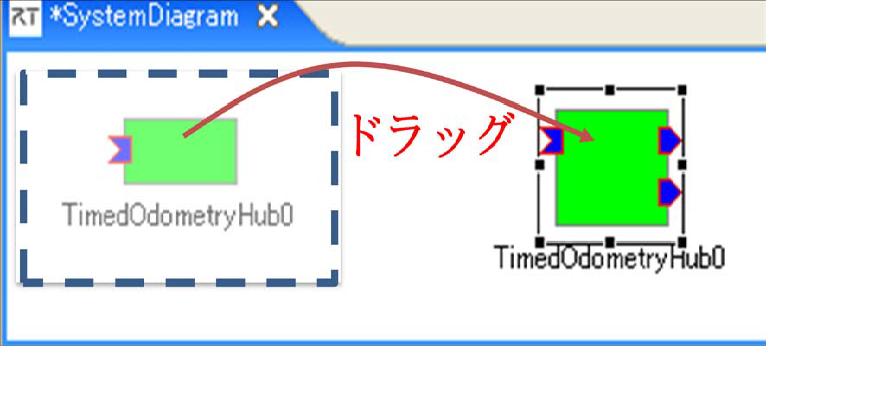
このコンポーネントはTimed Odometry データを複数に分岐するコンポー ネントです。
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
このコンポーネントは静止・移動障害物を回避しながら,指定物体を追う 経路を計画するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
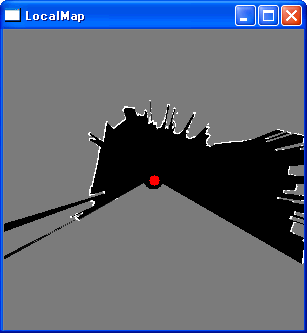
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
私たちは各行でロボットの動きの種類とそれのパラメータが含まれるモーションスクリプトを取得し,処理する一つのRTコンポーネントを提案します.本モーションスクリプトは人間にサービスを提供するようHRP-4を制御するために使用する.モーションスクリプトの行は任意の逆運動学の解とモーションプランナーで求められる解法から得られる.実験ではボトルからグラスに水を注ぎ,人に手渡す簡単なサービスを行う.
OpenHRP3 で開発したロボット制御コンポーネントを用いて、実ロボットマニピュレータPA10を制御するためのRTコンポーネント。シミュレーションと実機制御との間の移行を完全シームレス化することが可能。
著作権は開発者に帰属します。大学・公的研究機関における教育・研究目的では無償で利用を許可します。商用利用についてはお問い合わせください。
複数のデータベースでコンポーネントを管理する、階層型ソフトウェアアーキテクチャで使用されるデータベースノードコンポーネント(DNC)を構築。 DNCによる一括管理でもタスクシーケンスを簡単に変更できる。
Qtの公開条件およびRTミドルウェアの公開条件に準ずる。
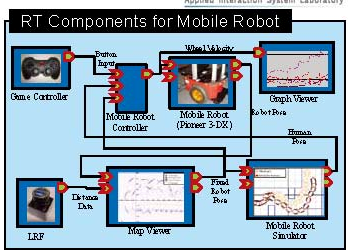
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

ロボット動作モニタコンポーネント
概要
本コンポーネントは、ロボットの三次元モデルをディスプレイに表示する機能を持つ コンポーネントです。注意事項
●コンパイルにはGLUTのインストールが必須となります。ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)