RT-Component class. More...
#include <RTObject.h>
Classes | |
| struct | deactivate_comps |
| Functor to deactivate RTC . More... | |
| struct | ec_copy |
| Functor to copy ExecutionContext . More... | |
| struct | ec_find |
| Functor to find ExecutionContext . More... | |
| struct | nv_name |
| Functor to find NVList . More... | |
| class | SdoServiceConsumerTerminator |
| struct | svc_name |
| Functor to find from SDOService Profile List by id . More... | |
Public Types | |
| using | PreCompActionListener = PreComponentActionListener |
| Adding PreComponentAction type listener. | |
| using | PreCompActionListenerType = PreComponentActionListenerType |
| using | PostCompActionListener = PostComponentActionListener |
| Adding PostComponentAction type listener. | |
| using | PostCompActionListenerType = PostComponentActionListenerType |
| using | ECActionListenerType = ExecutionContextActionListenerType |
| Adding ExecutionContextAction type listener. | |
| using | ECActionListener = ExecutionContextActionListener |
Public Member Functions | |
| RTObject_impl (Manager *manager) | |
| Constructor. | |
| RTObject_impl (CORBA::ORB_ptr orb, PortableServer::POA_ptr poa) | |
| Constructor. | |
| ~RTObject_impl () override | |
| Virtual destructor. | |
| ReturnCode_t | initialize () override |
| [CORBA interface] Initialize the RTC that realizes this interface. | |
| ReturnCode_t | finalize () override |
| [CORBA interface] Finalize the RTC for destruction | |
| ReturnCode_t | exit () override |
| [CORBA interface]top the RTC's execution context(s) and finalize it along with its contents. | |
| CORBA::Boolean | is_alive (ExecutionContext_ptr exec_context) override |
| [CORBA interface] Confirm whether RTC is the alive state | |
| ExecutionContext_ptr | get_context (UniqueId ec_id) override |
| [CORBA interface] Get ExecutionContext. | |
| ExecutionContextList * | get_owned_contexts () override |
| [CORBA interface] Get ExecutionContextList. | |
| ExecutionContextList * | get_participating_contexts () override |
| [CORBA interface] Get participating ExecutionContextList. | |
| ExecutionContextHandle_t | get_context_handle (ExecutionContext_ptr cxt) override |
| [CORBA interface] Return a handle of a ExecutionContext | |
| UniqueId | attach_context (ExecutionContext_ptr exec_context) override |
| [CORBA interface] Attach ExecutionContext | |
| UniqueId | bindContext (ExecutionContext_ptr exec_context) |
| ReturnCode_t | detach_context (UniqueId ec_id) override |
| [CORBA interface] Detach ExecutionContext. | |
| ComponentProfile * | get_component_profile () override |
| [RTObject CORBA interface] Get RTC's profile | |
| PortServiceList * | get_ports () override |
| [RTObject CORBA interface] Get Ports | |
| ReturnCode_t | on_initialize () override |
| [ComponentAction CORBA interface] Initialize RTC | |
| ReturnCode_t | on_finalize () override |
| [ComponentAction CORBA interface] Finalize RTC | |
| ReturnCode_t | on_startup (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Startup RTC | |
| ReturnCode_t | on_shutdown (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Shutdown RTC | |
| ReturnCode_t | on_activated (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Activate RTC | |
| ReturnCode_t | on_deactivated (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Deactivate RTC | |
| ReturnCode_t | on_aborting (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Transition to Error State | |
| ReturnCode_t | on_error (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Error Processing of RTC | |
| ReturnCode_t | on_reset (UniqueId ec_id) override |
| [ComponentAction CORBA interface] Resetting RTC | |
| ReturnCode_t | on_execute (UniqueId ec_id) override |
| [DataFlowComponentAction CORBA interface] Primary Periodic Operation of RTC | |
| ReturnCode_t | on_state_update (UniqueId ec_id) override |
| [DataFlowComponentAction CORBA interface] Secondary Periodic Operation of RTC | |
| ReturnCode_t | on_rate_changed (UniqueId ec_id) override |
| [DataFlowComponentAction CORBA interface] Notify rate changed | |
| SDOPackage::OrganizationList * | get_owned_organizations () override |
| [SDO interface] Get Organization list | |
| char * | get_sdo_id () override |
| [SDO interface] Get the SDO ID | |
| char * | get_sdo_type () override |
| [SDO interface] Get SDO type | |
| SDOPackage::DeviceProfile * | get_device_profile () override |
| [SDO interface] Get SDO DeviceProfile list | |
| SDOPackage::ServiceProfileList * | get_service_profiles () override |
| [SDO interface] Get SDO ServiceProfile | |
| SDOPackage::ServiceProfile * | get_service_profile (const char *id) override |
| [SDO interface] Get specified ServiceProfile | |
| SDOPackage::SDOService_ptr | get_sdo_service (const char *id) override |
| [SDO interface] Get specified SDO Service's reference | |
| SDOPackage::Configuration_ptr | get_configuration () override |
| [SDO interface] Get Configuration object | |
| SDOPackage::Monitoring_ptr | get_monitoring () override |
| [SDO interface] Get Monitoring object | |
| SDOPackage::OrganizationList * | get_organizations () override |
| [SDO interface] Get Organization list | |
| SDOPackage::NVList * | get_status_list () override |
| [SDO interface] Get SDO Status list | |
| CORBA::Any * | get_status (const char *name) override |
| [SDO interface] Get SDO Status | |
| const char * | getInstanceName () |
| [local interface] Get instance name | |
| void | setInstanceName (const char *instance_name) |
| [local interface] Set instance name | |
| const char * | getTypeName () |
| [local interface] Get type name | |
| const char * | getDescription () |
| [local interface] GetDescription | |
| const char * | getVersion () |
| [local interface] Get version information | |
| const char * | getVendor () |
| [local interface] Get vendor | |
| const char * | getCategory () |
| [local interface] Get category information | |
| std::vector< std::string > | getNamingNames () |
| [local interface] Get Naming Server information | |
| void | setObjRef (RTObject_ptr rtobj) |
| [local interface] Set the object reference | |
| RTObject_ptr | getObjRef () const |
| [local interface] Get the object reference | |
| void | setProperties (const coil::Properties &prop) |
| [local interface] Set RTC property | |
| coil::Properties & | getProperties () |
| [local interface] Get RTC property | |
| template<typename VarType > | |
| bool | bindParameter (const char *param_name, VarType &var, const char *def_val, bool(*trans)(VarType &, const char *)=coil::stringTo) |
| Setup for configuration parameters. | |
| ConfigAdmin & | getConfigService () |
| Getting configuration service. | |
| void | updateParameters (const char *config_set) |
| Update configuration parameters (by ID) | |
| bool | addPort (PortBase &port) |
| [local interface] Register Port | |
| bool | addPort (PortService_ptr port) |
| [local interface] Register Port | |
| bool | addPort (CorbaPort &port) |
| [local interface] Register Port | |
| void | registerPort (PortBase &port) |
| [local interface] Register Port | |
| void | registerPort (PortService_ptr port) |
| [local interface] Register Port | |
| void | registerPort (CorbaPort &port) |
| [local interface] Register Port | |
| bool | addInPort (const char *name, InPortBase &inport) |
| [local interface] Register DataInPort | |
| const std::vector< InPortBase * > & | getInPorts () const |
| const std::vector< OutPortBase * > & | getOutPorts () const |
| void | registerInPort (const char *name, InPortBase &inport) |
| [local interface] Register DataInPort | |
| bool | addOutPort (const char *name, OutPortBase &outport) |
| [local interface] Register DataOutPort | |
| void | registerOutPort (const char *name, OutPortBase &outport) |
| [local interface] Register DataOutPort | |
| bool | removeInPort (InPortBase &inport) |
| [local interface] Unregister InPort | |
| bool | removeOutPort (OutPortBase &outport) |
| [local interface] Unregister OutPort | |
| bool | removePort (PortBase &port) |
| [local interface] Unregister Port | |
| bool | removePort (PortService_ptr port) |
| [local interface] Unregister Port | |
| bool | removePort (CorbaPort &port) |
| [local interface] Unregister Port | |
| void | deletePort (PortBase &port) |
| [local interface] Unregister Port | |
| void | deletePort (PortService_ptr port) |
| [local interface] Unregister Port | |
| void | deletePort (CorbaPort &port) |
| [local interface] Unregister Port | |
| void | deletePortByName (const char *port_name) |
| [local interface] Delete Port by specifying its name | |
| ExecutionContext_ptr | getExecutionContext (RTC::UniqueId ec_id) |
| [local interface] Getting current execution context | |
| double | getExecutionRate (RTC::UniqueId ec_id) |
| [local interface] Getting current context' execution rate | |
| ReturnCode_t | setExecutionRate (RTC::UniqueId ec_id, double rate) |
| [local interface] Setting current context' execution rate | |
| ReturnCode_t | deactivate (RTC::UniqueId ec_id) |
| [local interface] Make transition to Inactive state | |
| ReturnCode_t | activate (RTC::UniqueId ec_id) |
| [local interface] Make transition to Active state | |
| ReturnCode_t | reset (RTC::UniqueId ec_id) |
| [local interface] Resetting and go to Inactive state | |
| bool | addSdoServiceProvider (const SDOPackage::ServiceProfile &prof, SdoServiceProviderBase *provider) |
| [local interface] Set a SDO service provider | |
| bool | removeSdoServiceProvider (const char *id) |
| [local interface] Remove a SDO service provider | |
| bool | addSdoServiceConsumer (const SDOPackage::ServiceProfile &prof) |
| [local interface] Set a SDO service provider | |
| bool | removeSdoServiceConsumer (const char *id) |
| [local interface] Remove a SDO service provider | |
| void | removeSdoServiceConsumerStartThread (const char *id) |
| [local interface] Remove a SDO service provider | |
| bool | readAll () |
| Readout the value from All InPorts. | |
| bool | writeAll () |
| The write() method of all OutPort is called. | |
| void | setReadAll (bool read=true, bool completion=false) |
| Set whether to execute the readAll() method. | |
| void | setWriteAll (bool write=true, bool completion=false) |
| Set whether to execute the writeAll() method. | |
| void | finalizePorts () |
| Unregister All Ports. | |
| void | finalizeContexts () |
| The ExecutionContextBase list is deleted. | |
| void | setINSObjRef (RTC::LightweightRTObject_ptr obj) |
| void | addPreComponentActionListener (PreCompActionListenerType listener_type, PreCompActionListener *listener, bool autoclean=true) |
| template<class Listener > | |
| PreComponentActionListener * | addPreComponentActionListener (PreCompActionListenerType listener_type, Listener &obj, void(Listener::*memfunc)(UniqueId ec_id)) |
| void | removePreComponentActionListener (PreComponentActionListenerType listener_type, PreComponentActionListener *listener) |
| Removing PreComponentAction type listener. | |
| void | addPostComponentActionListener (PostComponentActionListenerType listener_type, PostComponentActionListener *listener, bool autoclean=true) |
| template<class Listener > | |
| PostComponentActionListener * | addPostComponentActionListener (PostCompActionListenerType listener_type, Listener &obj, void(Listener::*memfunc)(UniqueId ec_id, ReturnCode_t ret)) |
| void | removePostComponentActionListener (PostComponentActionListenerType listener_type, PostComponentActionListener *listener) |
| Removing PostComponentAction type listener. | |
| void | addPortActionListener (PortActionListenerType listener_type, PortActionListener *listener, bool autoclean=true) |
| Adding PortAction type listener. | |
| template<class Listener > | |
| PortActionListener * | addPortActionListener (PortActionListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const RTC::PortProfile &)) |
| void | removePortActionListener (PortActionListenerType listener_type, PortActionListener *listener) |
| Removing PortAction type listener. | |
| void | addExecutionContextActionListener (ECActionListenerType listener_type, ECActionListener *listener, bool autoclean=true) |
| template<class Listener > | |
| ECActionListener * | addExecutionContextActionListener (ECActionListenerType listener_type, Listener &obj, void(Listener::*memfunc)(UniqueId)) |
| void | removeExecutionContextActionListener (ECActionListenerType listener_type, ECActionListener *listener) |
| Removing ExecutionContextAction type listener. | |
| void | addPortConnectListener (PortConnectListenerType listener_type, PortConnectListener *listener, bool autoclean=true) |
| Adding PortConnect type listener. | |
| template<class Listener > | |
| PortConnectListener * | addPortConnectListener (PortConnectListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const char *, ConnectorProfile &)) |
| void | removePortConnectListener (PortConnectListenerType listener_type, PortConnectListener *listener) |
| Removing PortConnect type listener. | |
| void | addPortConnectRetListener (PortConnectRetListenerType listener_type, PortConnectRetListener *listener, bool autoclean=true) |
| Adding PortConnectRet type listener. | |
| template<class Listener > | |
| PortConnectRetListener * | addPortConnectRetListener (PortConnectRetListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const char *, ConnectorProfile &, ReturnCode_t)) |
| void | removePortConnectRetListener (PortConnectRetListenerType listener_type, PortConnectRetListener *listener) |
| Removing PortConnectRet type listener. | |
| void | addConfigurationParamListener (ConfigurationParamListenerType type, ConfigurationParamListener *listener, bool autoclean=true) |
| Adding ConfigurationParamListener. | |
| template<class Listener > | |
| ConfigurationParamListener * | addConfigurationParamListener (ConfigurationParamListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const char *, const char *)) |
| void | removeConfigurationParamListener (ConfigurationParamListenerType type, ConfigurationParamListener *listener) |
| Removing ConfigurationParamListener. | |
| void | addConfigurationSetListener (ConfigurationSetListenerType type, ConfigurationSetListener *listener, bool autoclean=true) |
| Adding ConfigurationSetListener. | |
| template<class Listener > | |
| ConfigurationSetListener * | addConfigurationSetListener (ConfigurationSetListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const coil::Properties &config_set)) |
| void | removeConfigurationSetListener (ConfigurationSetListenerType type, ConfigurationSetListener *listener) |
| Removing ConfigurationSetListener. | |
| void | addConfigurationSetNameListener (ConfigurationSetNameListenerType type, ConfigurationSetNameListener *listener, bool autoclean=true) |
| Adding ConfigurationSetNameListener. | |
| template<class Listener > | |
| ConfigurationSetNameListener * | addConfigurationSetNameListener (ConfigurationSetNameListenerType type, Listener &obj, void(Listener::*memfunc)(const char *)) |
| void | removeConfigurationSetNameListener (ConfigurationSetNameListenerType type, ConfigurationSetNameListener *listener) |
| Removing ConfigurationSetNameListener. | |
| void | addPreFsmActionListener (PreFsmActionListenerType listener_type, PreFsmActionListener *listener, bool autoclean=true) |
| Adding PreFsmAction type listener. | |
| template<class Listener > | |
| PreFsmActionListener * | addPreFsmActionListener (PreFsmActionListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const char *state)) |
| void | removePreFsmActionListener (PreFsmActionListenerType listener_type, PreFsmActionListener *listener) |
| Removing PreFsmAction type listener. | |
| void | addPostFsmActionListener (PostFsmActionListenerType listener_type, PostFsmActionListener *listener, bool autoclean=true) |
| Adding PostFsmAction type listener. | |
| template<class Listener > | |
| PostFsmActionListener * | addPostFsmActionListener (PostFsmActionListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const char *state, ReturnCode_t ret)) |
| void | removePostFsmActionListener (PostFsmActionListenerType listener_type, PostFsmActionListener *listener) |
| Removing PostFsmAction type listener. | |
| void | addFsmProfileListener (FsmProfileListenerType listener_type, FsmProfileListener *listener, bool autoclean=true) |
| Adding FsmProfile type listener. | |
| template<class Listener > | |
| FsmProfileListener * | addFsmProfileListener (FsmProfileListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const RTC::PortProfile &)) |
| void | removeFsmProfileListener (FsmProfileListenerType listener_type, FsmProfileListener *listener) |
| Removing FsmProfile type listener. | |
| void | addFsmStructureListener (FsmStructureListenerType listener_type, FsmStructureListener *listener, bool autoclean=true) |
| Adding FsmStructure type listener. | |
| template<class Listener > | |
| FsmStructureListener * | addFsmStructureListener (FsmStructureListenerType listener_type, Listener &obj, void(Listener::*memfunc)(const RTC::PortProfile &)) |
| void | removeFsmStructureListener (FsmStructureListenerType listener_type, FsmStructureListener *listener) |
| Removing FsmStructure type listener. | |
| void | preOnInitialize (UniqueId ec_id) |
| void | preOnFinalize (UniqueId ec_id) |
| void | preOnStartup (UniqueId ec_id) |
| void | preOnShutdown (UniqueId ec_id) |
| void | preOnActivated (UniqueId ec_id) |
| void | preOnDeactivated (UniqueId ec_id) |
| void | preOnAborting (UniqueId ec_id) |
| void | preOnError (UniqueId ec_id) |
| void | preOnReset (UniqueId ec_id) |
| void | preOnExecute (UniqueId ec_id) |
| void | preOnStateUpdate (UniqueId ec_id) |
| void | preOnRateChanged (UniqueId ec_id) |
| void | postOnInitialize (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnFinalize (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnStartup (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnShutdown (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnActivated (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnDeactivated (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnAborting (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnError (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnReset (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnExecute (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnStateUpdate (UniqueId ec_id, ReturnCode_t ret) |
| void | postOnRateChanged (UniqueId ec_id, ReturnCode_t ret) |
| void | onAddPort (const PortProfile &pprof) |
| void | onRemovePort (const PortProfile &pprof) |
| void | onAttachExecutionContext (UniqueId ec_id) |
| void | onDetachExecutionContext (UniqueId ec_id) |
| void | preOnFsmInit (const char *state) |
| void | preOnFsmEntry (const char *state) |
| void | preOnFsmDo (const char *state) |
| void | preOnFsmExit (const char *state) |
| void | preOnFsmStateChange (const char *state) |
| void | postOnFsmInit (const char *state, ReturnCode_t ret) |
| void | postOnFsmEntry (const char *state, ReturnCode_t ret) |
| void | postOnFsmDo (const char *state, ReturnCode_t ret) |
| void | postOnFsmExit (const char *state, ReturnCode_t ret) |
| void | postOnFsmStateChange (const char *state, ReturnCode_t ret) |
Static Public Member Functions | |
| static bool | isOwnExecutionContext (RTC::UniqueId ec_id) |
| [local interface] Checking if the current context is own context | |
Protected Member Functions | |
| virtual ReturnCode_t | onInitialize () |
| Callback function to initialize. | |
| virtual ReturnCode_t | onFinalize () |
| Callback function to finalize. | |
| virtual ReturnCode_t | onStartup (RTC::UniqueId ec_id) |
| Callback function for startup action. | |
| virtual ReturnCode_t | onShutdown (RTC::UniqueId ec_id) |
| Callback function for shutdown action. | |
| virtual ReturnCode_t | onActivated (RTC::UniqueId ec_id) |
| Callback function to activate. | |
| virtual ReturnCode_t | onDeactivated (RTC::UniqueId ec_id) |
| Callback function to deactivate. | |
| virtual ReturnCode_t | onExecute (RTC::UniqueId ec_id) |
| Callback function to execute periodically. | |
| virtual ReturnCode_t | onAborting (RTC::UniqueId ec_id) |
| Callback function to abort. | |
| virtual ReturnCode_t | onError (RTC::UniqueId ec_id) |
| Callback function for error handling. | |
| virtual ReturnCode_t | onReset (RTC::UniqueId ec_id) |
| Callback function to reset. | |
| virtual ReturnCode_t | onStateUpdate (RTC::UniqueId ec_id) |
| Callback function to update the state. | |
| virtual ReturnCode_t | onRateChanged (RTC::UniqueId ec_id) |
| Callback function to change execution cycle. | |
| void | shutdown () |
| Shutdown RTC This operation ececutes RTC's termination. This unregisters all Ports, deactivates corresponding CORBA objects and shuts down RTC. This is called from onlu finlize(). | |
| ReturnCode_t | initMineEC () |
| Initialize my EC This function initializes mine ECs. This is called from only initialize(). | |
| void | startMineEC () |
| Starting my EC This function start mine ECs. This is called from only initialize(). | |
| void | finalizeMineEC () |
| Finalize my EC This function finalize mine ECs. This is called from only exit(). | |
| void | finalizeOtherEC () |
| Finalize my EC This function detaching the RTC from others' ECs. This is called from only exit(). | |
| ReturnCode_t | getInheritedECOptions (coil::Properties &default_opts) |
| Get inherited EC options This function getting inherited EC options. This is called from only initMineEC(). | |
| ReturnCode_t | getPrivateContextOptions (std::vector< coil::Properties > &ec_args) |
| getting individual EC options from RTC's configuration file | |
| ReturnCode_t | getGlobalContextOptions (coil::Properties &global_ec_props) |
| getting global EC options from rtc.conf | |
| ReturnCode_t | getContextOptions (std::vector< coil::Properties > &ec_args) |
| getting EC options | |
| ReturnCode_t | createContexts (std::vector< coil::Properties > &ec_args) |
| creating, initializing and binding context | |
| void | initSdoService () |
| initialize SDO service stuff This function calles SdoService's initialize(). | |
Static Protected Member Functions | |
| static ReturnCode_t | findExistingEC (coil::Properties &ec_arg, RTC::ExecutionContextBase *&ec) |
| fiding existing EC from the factory | |
Protected Attributes | |
| Logger | rtclog |
| Logger stream . | |
| Manager * | m_pManager |
| Manager object . | |
| CORBA::ORB_var | m_pORB |
| The pointer to the ORB . | |
| PortableServer::POA_var | m_pPOA |
| The pointer to the POA . | |
| SDOPackage::OrganizationList | m_sdoOwnedOrganizations |
| SDO owned organization list . | |
| SDOPackage::Configuration_impl * | m_pSdoConfigImpl |
| The pointer to the SDO Configuration Object . | |
| SDOPackage::Configuration_var | m_pSdoConfig |
| The pointer to the SDO Configuration Interface . | |
| SDOPackage::OrganizationList | m_sdoOrganizations |
| SDO organization . | |
| SDOPackage::NVList | m_sdoStatus |
| SDO Status . | |
| ComponentProfile | m_profile |
| ComponentProfile . | |
| RTObject_var | m_objref |
| Object reference . | |
| PortAdmin | m_portAdmin |
| List of Port Object reference . | |
| std::vector< InPortBase * > | m_inports |
| List of InPortBase* . | |
| std::vector< OutPortBase * > | m_outports |
| List of OutPortBase* . | |
| ExecutionContextServiceList | m_ecMine |
| List of owned ExecutionContextService . | |
| std::vector< ExecutionContextBase * > | m_eclist |
| List of ExecutionContextBase . | |
| ExecutionContextServiceList | m_ecOther |
| List of participating ExecutionContextService . | |
| bool | m_created |
| Created Status Flag . | |
| bool | m_exiting |
| RTC Finalize Status Flag . | |
| coil::Properties | m_properties |
| RTC's Property . | |
| ConfigAdmin | m_configsets |
| Configuration Administrator Object . | |
| SdoServiceAdmin | m_sdoservice |
| SDO Service Administrator Object . | |
| bool | m_readAll |
| flag for readAll() | |
| bool | m_writeAll |
| flag for writeAll() | |
| bool | m_readAllCompletion |
| flag for readAll() | |
| bool | m_writeAllCompletion |
| flag for writeAll() | |
| ComponentActionListeners | m_actionListeners |
| ComponentActionListener holder. | |
| PortConnectListeners | m_portconnListeners |
| PortConnectListener holder. | |
| FsmActionListeners | m_fsmActionListeners |
| ComponentActionListener holder. | |
| RTC::LightweightRTObject_var | m_insref |
| SdoServiceConsumerTerminator * | m_sdoconterm |
Detailed Description
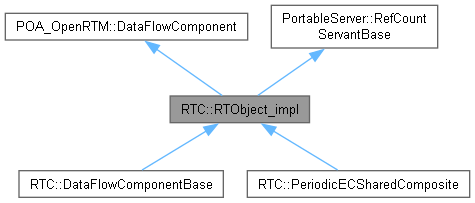
RT-Component class.
This is a class to be a base of each RT-Component. This is a implementation class of lightweightRTComponent in Robotic Technology Component specification. This provides a implementation of ComponentAction interface that offers the the component's function and the implementation of LightweightRTObject for management of the component's lifecycle. When users actually create the components, they should use each subclass corresponding to Execution Semantics.
(In current implementation, since only Periodic Sampled Data Processing is supported, this class inherits dataFlowComponent directly.)
- Since
- 0.2.0
Member Typedef Documentation
◆ ECActionListener
◆ ECActionListenerType
Adding ExecutionContextAction type listener.
This operation adds certain listeners related to ComponentActions post events. The following listener types are available.
- ADD_PORT: At adding ExecutionContext
- REMOVE_PORT: At removing ExecutionContext
Listeners should have the following function operator().
ExecutionContextActionListener::operator()(UniqueId ec_id)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removeExecutionContextActionListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
◆ PostCompActionListener
Adding PostComponentAction type listener.
This operation adds certain listeners related to ComponentActions post events. The following listener types are available.
- POST_ON_INITIALIZE: after onInitialize
- POST_ON_FINALIZE: after onFinalize
- POST_ON_STARTUP: after onStartup
- POST_ON_SHUTDOWN: after onShutdown
- POST_ON_ACTIVATED: after onActivated
- POST_ON_DEACTIVATED: after onDeactivated
- POST_ON_ABORTED: after onAborted
- POST_ON_ERROR: after onError
- POST_ON_RESET: after onReset
- POST_ON_EXECUTE: after onExecute
- POST_ON_STATE_UPDATE: after onStateUpdate
Listeners should have the following function operator().
PostComponentActionListener::operator()(UniqueId ec_id, ReturnCode_t ret)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePostComponentActionListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
◆ PostCompActionListenerType
◆ PreCompActionListener
Adding PreComponentAction type listener.
This operation adds certain listeners related to ComponentActions pre events. The following listener types are available.
- PRE_ON_INITIALIZE: before onInitialize
- PRE_ON_FINALIZE: before onFinalize
- PRE_ON_STARTUP: before onStartup
- PRE_ON_SHUTDOWN: before onShutdown
- PRE_ON_ACTIVATED: before onActivated
- PRE_ON_DEACTIVATED: before onDeactivated
- PRE_ON_ABORTED: before onAborted
- PRE_ON_ERROR: before onError
- PRE_ON_RESET: before onReset
- PRE_ON_EXECUTE: before onExecute
- PRE_ON_STATE_UPDATE: before onStateUpdate
Listeners should have the following function operator().
PreComponentActionListener::operator()(UniqueId ec_id)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePreComponentActionListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
◆ PreCompActionListenerType
Constructor & Destructor Documentation
◆ RTObject_impl() [1/2]
|
explicit |
◆ RTObject_impl() [2/2]
| RTC::RTObject_impl::RTObject_impl | ( | CORBA::ORB_ptr | orb, |
| PortableServer::POA_ptr | poa ) |
Constructor.
Constructor
- Parameters
-
orb ORB poa POA
◆ ~RTObject_impl()
|
override |
Virtual destructor.
Member Function Documentation
◆ activate()
| ReturnCode_t RTC::RTObject_impl::activate | ( | RTC::UniqueId | ec_id | ) |
[local interface] Make transition to Active state
This function makes transition from Inactive to Active state. This function is assumed to be called from the following functions.
The argument of this function should be the first argument (UniqueId ec_id) of the above function.
- Parameters
-
ec_id The above functions' first argument "exec_handle."
- Returns
- Return code
◆ addConfigurationParamListener() [1/2]
|
inline |
References addConfigurationParamListener().
◆ addConfigurationParamListener() [2/2]
| void RTC::RTObject_impl::addConfigurationParamListener | ( | ConfigurationParamListenerType | type, |
| ConfigurationParamListener * | listener, | ||
| bool | autoclean = true ) |
Adding ConfigurationParamListener.
This function adds a listener object which is called when update(const char* config_set, const char* config_param) is called. In the type argument, currently only ON_UPDATE_CONFIG_PARAM is allowed.
- Parameters
-
type ConfigurationParamListenerType value ON_UPDATE_CONFIG_PARAM is only allowed. listener ConfigurationParamListener listener object. autoclean a flag whether if the listener object autocleaned.
Referenced by addConfigurationParamListener().
◆ addConfigurationSetListener() [1/2]
|
inline |
References addConfigurationSetListener().
◆ addConfigurationSetListener() [2/2]
| void RTC::RTObject_impl::addConfigurationSetListener | ( | ConfigurationSetListenerType | type, |
| ConfigurationSetListener * | listener, | ||
| bool | autoclean = true ) |
Adding ConfigurationSetListener.
This function add a listener object which is called when ConfigurationSet is updated. Available events are the followings.
- Parameters
-
type ConfigurationSetListenerType value listener ConfigurationSetListener listener object. autoclean a flag whether if the listener object autocleaned.
Referenced by addConfigurationSetListener().
◆ addConfigurationSetNameListener() [1/2]
| void RTC::RTObject_impl::addConfigurationSetNameListener | ( | ConfigurationSetNameListenerType | type, |
| ConfigurationSetNameListener * | listener, | ||
| bool | autoclean = true ) |
Adding ConfigurationSetNameListener.
This function add a listener object which is called when ConfigurationSetName is updated. Available events are the followings.
- ON_UPDATE_CONFIG_SET: A ConfigurationSet has been updated.
- ON_REMOVE_CONFIG_SET: A ConfigurationSet has been deleted.
- ON_ACTIVATE_CONFIG_SET: A ConfigurationSet has been activated.
- Parameters
-
type ConfigurationSetNameListenerType value listener ConfigurationSetNameListener listener object. autoclean a flag whether if the listener object autocleaned.
Referenced by addConfigurationSetNameListener().
◆ addConfigurationSetNameListener() [2/2]
|
inline |
References addConfigurationSetNameListener().
◆ addExecutionContextActionListener() [1/2]
| void RTC::RTObject_impl::addExecutionContextActionListener | ( | ECActionListenerType | listener_type, |
| ECActionListener * | listener, | ||
| bool | autoclean = true ) |
Referenced by addExecutionContextActionListener().
◆ addExecutionContextActionListener() [2/2]
|
inline |
References addExecutionContextActionListener().
◆ addFsmProfileListener() [1/2]
| void RTC::RTObject_impl::addFsmProfileListener | ( | FsmProfileListenerType | listener_type, |
| FsmProfileListener * | listener, | ||
| bool | autoclean = true ) |
Adding FsmProfile type listener.
This operation adds certain listeners that is called when setting/getting FsmProfile and stae/transition/event add/remove to/from the FSM itself.
The following listener types are available.
- SET_FSM_PROFILE : Setting FSM Profile
- GET_FSM_PROFILE : Getting FSM Profile
- ADD_FSM_STATE : A State added to the FSM
- REMOVE_FSM_STATE : A State removed from FSM
- ADD_FSM_TRANSITION : A transition added to the FSM
- REMOVE_FSM_TRANSITION : A transition removed from FSM
- BIND_FSM_EVENT : An event bounded to the FSM
- UNBIND_FSM_EVENT : An event unbounded to the FSM
Listeners should have the following function operator().
FsmProfileListener::operator()(RTC::PortProfile pprof)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removeFsmProfileListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addFsmProfileListener().
◆ addFsmProfileListener() [2/2]
|
inline |
References addFsmProfileListener().
◆ addFsmStructureListener() [1/2]
| void RTC::RTObject_impl::addFsmStructureListener | ( | FsmStructureListenerType | listener_type, |
| FsmStructureListener * | listener, | ||
| bool | autoclean = true ) |
Adding FsmStructure type listener.
This operation adds certain listeners related to FSM structure data which are handled by ExtendedFsmService.
The following listener types are available.
- SET_FSM_STRUCTURE: Setting FSM structure
- GET_FSM_STRUCTURE: Getting FSM structure
Listeners should have the following function operator().
FsmStructureListener::operator()(RTC::FsmStructure structure)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removeFsmStructureListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addFsmStructureListener().
◆ addFsmStructureListener() [2/2]
|
inline |
References addFsmStructureListener().
◆ addInPort()
| bool RTC::RTObject_impl::addInPort | ( | const char * | name, |
| InPortBase & | inport ) |
[local interface] Register DataInPort
This operation registers DataInPort held by this RTC. Set "port.dataport" and "tcp_any" to property of Port, and create instances of DataInPort and register it.
- Parameters
-
name Port name inport DataInPort which is registered to the RTC
- Returns
- Register result (Successful:true, Failed:false)
◆ addOutPort()
| bool RTC::RTObject_impl::addOutPort | ( | const char * | name, |
| OutPortBase & | outport ) |
[local interface] Register DataOutPort
This operation registers DataOutPor held by this RTC. Set "port.dataport" and "tcp_any" to property of Port, and then create instances of DataOutPort and register it.
- Parameters
-
name Port name outport DataOutPort which is registered to the RTC
- Returns
- Register result (Successful:true, Failed:false)
◆ addPort() [1/3]
| bool RTC::RTObject_impl::addPort | ( | CorbaPort & | port | ) |
[local interface] Register Port
This operation registers a Port held by this RTC. In order to enable access to the Port from outside of RTC, the Port must be registered by this operation. The Port that is registered by this operation would be identified by PortProfile.name in the inside of RTC. Therefore, the Port should have unique PortProfile.name in the RTC. The registering Port would be activated properly, and the reference and the object reference would be stored in lists in RTC.
- Parameters
-
port Port which is registered to the RTC
- Returns
- Register result (Successful:true, Failed:false)
◆ addPort() [2/3]
| bool RTC::RTObject_impl::addPort | ( | PortBase & | port | ) |
[local interface] Register Port
This operation registers a Port held by this RTC. In order to enable access to the Port from outside of RTC, the Port must be registered by this operation. The Port that is registered by this operation would be identified by PortProfile.name in the inside of RTC. Therefore, the Port should have unique PortProfile.name in the RTC. The registering Port would be activated properly, and the reference and the object reference would be stored in lists in RTC.
- Parameters
-
port Port which is registered to the RTC
- Returns
- Register result (Successful:true, Failed:false)
◆ addPort() [3/3]
| bool RTC::RTObject_impl::addPort | ( | PortService_ptr | port | ) |
[local interface] Register Port
This operation registers a Port held by this RTC. In order to enable access to the Port from outside of RTC, the Port must be registered by this operation. The Port that is registered by this operation would be identified by PortProfile.name in the inside of RTC. Therefore, the Port should have unique PortProfile.name in the RTC. The registering Port would be activated properly, and the reference and the object reference would be stored in lists in RTC.
- Parameters
-
port Port which is registered to the RTC
- Returns
- Register result (Successful:true, Failed:false)
◆ addPortActionListener() [1/2]
|
inline |
References addPortActionListener().
◆ addPortActionListener() [2/2]
| void RTC::RTObject_impl::addPortActionListener | ( | PortActionListenerType | listener_type, |
| PortActionListener * | listener, | ||
| bool | autoclean = true ) |
Adding PortAction type listener.
This operation adds certain listeners related to ComponentActions post events. The following listener types are available.
- ADD_PORT: At adding Port
- REMOVE_PORT: At removing Port
Listeners should have the following function operator().
PortActionListener::operator()(RTC::PortProfile pprof)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePortActionListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addPortActionListener().
◆ addPortConnectListener() [1/2]
|
inline |
References addPortConnectListener().
◆ addPortConnectListener() [2/2]
| void RTC::RTObject_impl::addPortConnectListener | ( | PortConnectListenerType | listener_type, |
| PortConnectListener * | listener, | ||
| bool | autoclean = true ) |
Adding PortConnect type listener.
This operation adds certain listeners related to Port's connect actions. The following listener types are available.
- ON_NOTIFY_CONNECT: right after entering into notify_connect()
- ON_NOTIFY_DISCONNECT: right after entering into notify_disconnect()
- ON_UNSUBSCRIBE_INTERFACES: unsubscribing IF in notify_disconnect()
Listeners should have the following function operator().
PortConnectListener::operator()(const char*, ConnectorProfile)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePortConnectListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addPortConnectListener().
◆ addPortConnectRetListener() [1/2]
|
inline |
References addPortConnectRetListener().
◆ addPortConnectRetListener() [2/2]
| void RTC::RTObject_impl::addPortConnectRetListener | ( | PortConnectRetListenerType | listener_type, |
| PortConnectRetListener * | listener, | ||
| bool | autoclean = true ) |
Adding PortConnectRet type listener.
This operation adds certain listeners related to Port's connect actions. The following listener types are available.
- ON_CONNECT_NEXTPORT: after cascade-call in notify_connect()
- ON_SUBSCRIBE_INTERFACES: after IF subscribing in notify_connect()
- ON_CONNECTED: completed nofity_connect() connection process
- ON_DISCONNECT_NEXT: after cascade-call in notify_disconnect()
- ON_DISCONNECTED: completed notify_disconnect() disconnection process
Listeners should have the following function operator().
PortConnectRetListener::operator()(const char*, ConnectorProfile)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePortConnectRetListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addPortConnectRetListener().
◆ addPostComponentActionListener() [1/2]
|
inline |
References addPostComponentActionListener().
◆ addPostComponentActionListener() [2/2]
| void RTC::RTObject_impl::addPostComponentActionListener | ( | PostComponentActionListenerType | listener_type, |
| PostComponentActionListener * | listener, | ||
| bool | autoclean = true ) |
Referenced by addPostComponentActionListener().
◆ addPostFsmActionListener() [1/2]
|
inline |
References addPostFsmActionListener().
◆ addPostFsmActionListener() [2/2]
| void RTC::RTObject_impl::addPostFsmActionListener | ( | PostFsmActionListenerType | listener_type, |
| PostFsmActionListener * | listener, | ||
| bool | autoclean = true ) |
Adding PostFsmAction type listener.
This operation adds certain listeners related to FsmActions post events. The following listener types are available.
- POST_ON_INITIALIZE: after onInitialize
- POST_ON_FINALIZE: after onFinalize
- POST_ON_STARTUP: after onStartup
- POST_ON_SHUTDOWN: after onShutdown
- POST_ON_ACTIVATED: after onActivated
- POST_ON_DEACTIVATED: after onDeactivated
- POST_ON_ABORTED: after onAborted
- POST_ON_ERROR: after onError
- POST_ON_RESET: after onReset
- POST_ON_EXECUTE: after onExecute
- POST_ON_STATE_UPDATE: after onStateUpdate
Listeners should have the following function operator().
PostFsmActionListener::operator()(const char* state, ReturnCode_t ret)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePostFsmActionListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addPostFsmActionListener().
◆ addPreComponentActionListener() [1/2]
|
inline |
References addPreComponentActionListener().
◆ addPreComponentActionListener() [2/2]
| void RTC::RTObject_impl::addPreComponentActionListener | ( | PreCompActionListenerType | listener_type, |
| PreCompActionListener * | listener, | ||
| bool | autoclean = true ) |
Referenced by addPreComponentActionListener().
◆ addPreFsmActionListener() [1/2]
|
inline |
References addPreFsmActionListener().
◆ addPreFsmActionListener() [2/2]
| void RTC::RTObject_impl::addPreFsmActionListener | ( | PreFsmActionListenerType | listener_type, |
| PreFsmActionListener * | listener, | ||
| bool | autoclean = true ) |
Adding PreFsmAction type listener.
This operation adds certain listeners related to FsmActions pre events. The following listener types are available.
- PRE_ON_INITIALIZE: before onInitialize
- PRE_ON_FINALIZE: before onFinalize
- PRE_ON_STARTUP: before onStartup
- PRE_ON_SHUTDOWN: before onShutdown
- PRE_ON_ACTIVATED: before onActivated
- PRE_ON_DEACTIVATED: before onDeactivated
- PRE_ON_ABORTED: before onAborted
- PRE_ON_ERROR: before onError
- PRE_ON_RESET: before onReset
- PRE_ON_EXECUTE: before onExecute
- PRE_ON_STATE_UPDATE: before onStateUpdate
Listeners should have the following function operator().
PreFsmActionListener::operator()(UniqueId ec_id)
The ownership of the given listener object is transferred to this RTObject object in default. The given listener object will be destroied automatically in the RTObject's dtor or if the listener is deleted by removePreFsmActionListener() function. If you want to keep ownership of the listener object, give "false" value to 3rd argument to inhibit automatic destruction.
- Parameters
-
listener_type A listener type listener A pointer to a listener object autoclean A flag for automatic listener destruction
Referenced by addPreFsmActionListener().
◆ addSdoServiceConsumer()
| bool RTC::RTObject_impl::addSdoServiceConsumer | ( | const SDOPackage::ServiceProfile & | prof | ) |
[local interface] Set a SDO service provider
◆ addSdoServiceProvider()
| bool RTC::RTObject_impl::addSdoServiceProvider | ( | const SDOPackage::ServiceProfile & | prof, |
| SdoServiceProviderBase * | provider ) |
[local interface] Set a SDO service provider
◆ attach_context()
|
override |
[CORBA interface] Attach ExecutionContext
Inform this RTC that it is participating in the given execution context. Return a handle that represents the association of this RTC with the context. This operation is intended to be invoked by ExecutionContextOperations::add_component. It is not intended for use by other clients.
- Parameters
-
exec_context Participating ExecutionContext
- Returns
- ExecutionContext Handle
◆ bindContext()
| UniqueId RTC::RTObject_impl::bindContext | ( | ExecutionContext_ptr | exec_context | ) |
◆ bindParameter()
|
inline |
Setup for configuration parameters.
Bind configuration parameter to its variable. Specify the data type of configuration parameter as <VarType>.
- Parameters
-
param_name Configuration parameter name var Variables to store configuration parameter def_val Default value of configuration parameter trans Function to transform configuration parameter type into string format
- Returns
- Setup result (Successful:true, Failed:false)
References RTC::ConfigAdmin::bindParameter(), m_configsets, and RTC_TRACE.
◆ createContexts()
|
protected |
creating, initializing and binding context
◆ deactivate()
| ReturnCode_t RTC::RTObject_impl::deactivate | ( | RTC::UniqueId | ec_id | ) |
[local interface] Make transition to Inactive state
This function makes transition from Active to Inactive state. This function is assumed to be called from the following functions.
The argument of this function should be the first argument (UniqueId ec_id) of the above function.
- Parameters
-
ec_id The above functions' first argument "exec_handle."
- Returns
- Return code
◆ deletePort() [1/3]
| void RTC::RTObject_impl::deletePort | ( | CorbaPort & | port | ) |
[local interface] Unregister Port
This operation unregisters a Port held by this RTC.
- Parameters
-
port Port which is unregistered
◆ deletePort() [2/3]
| void RTC::RTObject_impl::deletePort | ( | PortBase & | port | ) |
[local interface] Unregister Port
This operation unregisters a Port held by this RTC.
- Parameters
-
port Port which is unregistered
◆ deletePort() [3/3]
| void RTC::RTObject_impl::deletePort | ( | PortService_ptr | port | ) |
[local interface] Unregister Port
This operation unregisters a Port held by this RTC.
- Parameters
-
port Port which is unregistered
◆ deletePortByName()
| void RTC::RTObject_impl::deletePortByName | ( | const char * | port_name | ) |
[local interface] Delete Port by specifying its name
Delete Port which RTC has by specifying its name.
- Parameters
-
port_name Name of Port which is deleted
◆ detach_context()
|
override |
[CORBA interface] Detach ExecutionContext.
Inform this RTC that it is no longer participating in the given execution context. This operation is intended to be invoked by ExecutionContextOperations::remove. It is not intended for use by other clients. Constraints
- This operation may not be invoked if this RTC is not already participating in the execution context. Such a call shall fail with ReturnCode_t::PRECONDITION_NOT_MET.
- This operation may not be invoked if this RTC is Active in the indicated execution context. Otherwise, it shall fail with ReturnCode_t::PRECONDITION_NOT_MET.
- Parameters
-
exec_handle Detaching ExecutionContext Handle
- Returns
- The return code of ReturnCode_t type
◆ exit()
|
override |
[CORBA interface]top the RTC's execution context(s) and finalize it along with its contents.
Any execution contexts for which the RTC is the owner shall be stopped. If the RTC participates in any execution contexts belonging to another RTC that contains it, directly or indirectly (i.e. the containing RTC is the owner of the ExecutionContext), it shall be deactivated in those contexts. After the RTC is no longer Active in any Running execution context, it and any RTCs contained transitively within it shall be finalized.
Constraints
- An RTC cannot be exited if it has not yet been initialized. Any attempt to exit an RTC that is in the Created state shall fail with ReturnCode_t::PRECONDITION_NOT_MET.
- Returns
- The return code of ReturnCode_t type
◆ finalize()
|
override |
[CORBA interface] Finalize the RTC for destruction
This invocation of this operation shall result in the invocation of the callback ComponentAction::on_finalize.
Constraints
- An RTC may not be finalized while it is participating in any execution context. It must first be removed with ExecutionContextOperations::remove. Otherwise, this operation shall fail with ReturnCode_t::PRECONDITION_NOT_MET.
- An RTC may not be finalized while it is in the Created state. Any attempt to invoke this operation while in that state shall fail with ReturnCode_t::PRECONDITION_NOT_MET.
- Application developers are not expected to call this operation directly; it exists for use by the RTC infrastructure.
- Returns
- The return code of ReturnCode_t type
◆ finalizeContexts()
| void RTC::RTObject_impl::finalizeContexts | ( | ) |
The ExecutionContextBase list is deleted.
◆ finalizeMineEC()
|
protected |
Finalize my EC This function finalize mine ECs. This is called from only exit().
◆ finalizeOtherEC()
|
protected |
◆ finalizePorts()
| void RTC::RTObject_impl::finalizePorts | ( | ) |
Unregister All Ports.
This operation deactivates the all Ports and deletes the all Port's registrations in the RTC
◆ findExistingEC()
|
staticprotected |
fiding existing EC from the factory
◆ get_component_profile()
|
override |
◆ get_configuration()
|
override |
[SDO interface] Get Configuration object
This operation returns an object implementing the Configuration interface. The Configuration interface is one of the interfaces that each SDO maintains. The interface is used to configure the attributes defined in DeviceProfile, ServiceProfile, and Organization. See OMG SDO specification Section 2.3.5, "Configuration Interface," on page 2-24 for more details about the Configuration interface.
- Returns
- The Configuration interface of an SDO.
- Exceptions
-
InterfaceNotImplemented The target SDO has no Configuration interface. SDONotExists The target SDO does not exist.(This exception is mapped to CORBA standard system exception OBJECT_NOT_EXIST.) NotAvailable The target SDO is reachable but cannot respond. InternalError The target SDO cannot execute the operation completely due to some internal error.
◆ get_context()
|
override |
[CORBA interface] Get ExecutionContext.
Obtain a reference to the execution context represented by the given handle. The mapping from handle to context is specific to a particular RTC instance. The given handle must have been obtained by a previous call to attach_context on this RTC.
- Parameters
-
exec_handle ExecutionContext handle
- Returns
- ExecutionContext
◆ get_context_handle()
|
override |
[CORBA interface] Return a handle of a ExecutionContext
This operation returns a handle that is associated with the given execution context.
◆ get_device_profile()
|
override |
[SDO interface] Get SDO DeviceProfile list
This operation returns the DeviceProfile of the SDO. If the SDO does not represent any hardware device, then a DeviceProfile with empty values are returned. This operation throws SDOException with one of the following types.
- Returns
- The DeviceProfile of the SDO.
◆ get_monitoring()
|
override |
[SDO interface] Get Monitoring object
This operation returns an object implementing the Monitoring interface. The Monitoring interface is one of the interfaces that each SDO maintains. The interface is used to monitor the properties of an SDO. See OMG SDO specification Section 2.3.7, "Monitoring Interface," on page 2-35 for more details about the Monitoring interface.
- Returns
- The Monitoring interface of an SDO.
- Exceptions
-
InterfaceNotImplemented The target SDO has no Configuration interface. SDONotExists The target SDO does not exist.(This exception is mapped to CORBA standard system exception OBJECT_NOT_EXIST.) NotAvailable The target SDO is reachable but cannot respond. InternalError The target SDO cannot execute the operation completely due to some internal error.
◆ get_organizations()
|
override |
[SDO interface] Get Organization list
An SDO belongs to zero or more organizations. If the SDO belongs to one or more organizations, this operation returns the list of organizations that the SDO belongs to. An empty list is returned if the SDO does not belong to any Organizations.
- Returns
- The list of Organizations that the SDO belong to.
◆ get_owned_contexts()
|
override |
[CORBA interface] Get ExecutionContextList.
This operation returns a list of all execution contexts owned by this RTC.
- Returns
- ExecutionContext List
◆ get_owned_organizations()
|
override |
[SDO interface] Get Organization list
SDOSystemElement can be the owner of zero or more organizations. If the SDOSystemElement owns one or more Organizations, this operation returns the list of Organizations that the SDOSystemElement owns. If it does not own any Organization, it returns empty list.
- Returns
- Owned Organization List
◆ get_participating_contexts()
|
override |
[CORBA interface] Get participating ExecutionContextList.
This operation returns a list of all execution contexts in which this RTC participates.
- Returns
- ExecutionContext List
◆ get_ports()
|
override |
[RTObject CORBA interface] Get Ports
This operation returns the reference of ports held by RTC.
- Returns
- PortServiceList
◆ get_sdo_id()
|
override |
◆ get_sdo_service()
|
override |
[SDO interface] Get specified SDO Service's reference
This operation returns an object implementing an SDO's service that is identified by the identifier specified as an argument. Different services provided by an SDO are distinguished with different identifiers. See OMG SDO specification Section 2.2.8, "ServiceProfile," on page 2-12 for more details.
- Parameters
-
id The identifier referring to one of the SDO Service
- Returns
- The reference requested to SDO Service.
- Exceptions
-
InvalidParameter Argument “id” is null, or if the ServiceProfile that is specified by argument “id” does not exist. SDONotExists The target SDO does not exist.(This exception is mapped to CORBA standard system exception OBJECT_NOT_EXIST.) NotAvailable The target SDO is reachable but cannot respond. InternalError The target SDO cannot execute the operation completely due to some internal error.
◆ get_sdo_type()
|
override |
◆ get_service_profile()
|
override |
[SDO interface] Get specified ServiceProfile
This operation returns the ServiceProfile that is specified by the argument "id."
- Parameters
-
id The identifier referring to one of the ServiceProfiles.
- Returns
- The profile of the specified service.
- Exceptions
-
InvalidParameter The ServiceProfile that is specified by the argument 'id' does not exist or if 'id' is 'null.' SDONotExists The target SDO does not exist.(This exception is mapped to CORBA standard system exception OBJECT_NOT_EXIST.) NotAvailable The target SDO is reachable but cannot respond. InternalError The target SDO cannot execute the operation completely due to some internal error.
◆ get_service_profiles()
|
override |
[SDO interface] Get SDO ServiceProfile
This operation returns a list of ServiceProfiles that the SDO has. If the SDO does not provide any service, then an empty list is returned. This operation throws SDOException with one of the following types.
- Returns
- List of ServiceProfiles of all the services the SDO is providing.
◆ get_status()
|
override |
[SDO interface] Get SDO Status
- Parameters
-
name One of the parameters defining the "status" of an SDO.
- Returns
- The value of the specified status parameter.
- Exceptions
-
SDONotExists The target SDO does not exist.(This exception is mapped to CORBA standard system exception OBJECT_NOT_EXIST.) NotAvailable The target SDO is reachable but cannot respond. InvalidParameter The parameter defined by "name" is null or does not exist. InternalError The target SDO cannot execute the operation completely due to some internal error.
◆ get_status_list()
|
override |
◆ getCategory()
|
inline |
◆ getConfigService()
|
inline |
Getting configuration service.
This operation returns configuration service object. By using this service, user can manipulate configuration parameters. Mainly the following operations are supported.
- unbindParameter(): Unbinding parameters
- update(): Updateing parameters
- update(set_name): Updating a specific configuration set
- update(set_name, param_name): Updating specific parameter in a set
- isExist(): Checking existence of a parameter
- isChanged(): Check if a parameter was updated
- changedParameters(): Getting changed parameter list
- getActiveId(): Getting active configuration set name
- haveConfig(config_id): Checking if having a specified configuration set
- getConfigurationSets(): getting all the configuration sets
- getConfigurationSet(set_id): Getting a configuration set
Callback related member functions
- addConfigurationParamListener(): Adding listener
- removeConfigurationParamListener(): Removing listener
- addConfigurationSetListener(): Adding listener
- removeConfigurationSetListener(): Removing listener
- addConfigurationSetNameListener(): Adding listener
- removeConfigurationSetNameListener(): Removing listener
See details in the ConfigAdmin class reference
- Returns
- ConfigAdmin object
References m_configsets.
◆ getContextOptions()
|
protected |
getting EC options
◆ getDescription()
|
inline |
◆ getExecutionContext()
| ExecutionContext_ptr RTC::RTObject_impl::getExecutionContext | ( | RTC::UniqueId | ec_id | ) |
[local interface] Getting current execution context
This function is the local version of get_context(). completely same as get_context() function. This function is assumed to be called from the following functions.
- onStartup()
- onShutdown()
- onActivated()
- onDeactivated()
- onExecute()
- onAborting()
- onError()
- onReset()
- onStateUpdate()
- onRateChanged()
The argument of this function should be the first argument (UniqueId ec_id) of the above functions.
- Parameters
-
ec_id The above functions' first argument "exec_handle."
◆ getExecutionRate()
| double RTC::RTObject_impl::getExecutionRate | ( | RTC::UniqueId | ec_id | ) |
[local interface] Getting current context' execution rate
This function returns current execution rate in this context. If this context's kind is not PERIODC, behavior is not defined. This function is assumed to be called from the following functions.
- onStartup()
- onShutdown()
- onActivated()
- onDeactivated()
- onExecute()
- onAborting()
- onError()
- onReset()
- onStateUpdate()
- onRateChanged()
The argument of this function should be the first argument (UniqueId ec_id) of the above functions.
- Parameters
-
ec_id The above functions' first argument "exec_handle."
◆ getGlobalContextOptions()
|
protected |
getting global EC options from rtc.conf
◆ getInheritedECOptions()
|
protected |
Get inherited EC options This function getting inherited EC options. This is called from only initMineEC().
◆ getInPorts()
|
inline |
References m_inports.
◆ getInstanceName()
|
inline |
◆ getNamingNames()
| std::vector< std::string > RTC::RTObject_impl::getNamingNames | ( | ) |
[local interface] Get Naming Server information
Get Naming Server information that has been set.
- Returns
- Naming Server list
◆ getObjRef()
| RTObject_ptr RTC::RTObject_impl::getObjRef | ( | ) | const |
[local interface] Get the object reference
Get CORBA object reference that has been set
- Returns
- The object reference
◆ getOutPorts()
|
inline |
References m_outports.
◆ getPrivateContextOptions()
|
protected |
getting individual EC options from RTC's configuration file
◆ getProperties()
| coil::Properties & RTC::RTObject_impl::getProperties | ( | ) |
◆ getTypeName()
|
inline |
◆ getVendor()
|
inline |
◆ getVersion()
|
inline |
◆ initialize()
|
override |
[CORBA interface] Initialize the RTC that realizes this interface.
The invocation of this operation shall result in the invocation of the callback ComponentAction::on_initialize.
Constraints
- An RTC may be initialized only while it is in the Created state. Any attempt to invoke this operation while in another state shall fail with ReturnCode_t::PRECONDITION_NOT_MET.
- Application developers are not expected to call this operation directly; it exists for use by the RTC infrastructure.
- Returns
- The return code of ReturnCode_t type
◆ initMineEC()
|
protected |
Initialize my EC This function initializes mine ECs. This is called from only initialize().
◆ initSdoService()
|
protected |
initialize SDO service stuff This function calles SdoService's initialize().
◆ is_alive()
|
override |
[CORBA interface] Confirm whether RTC is the alive state
A component is alive or not regardless of the execution context from which it is observed. However, whether or not it is Active, Inactive, or in Error is dependent on the execution context(s) in which it is running. That is, it may be Active in one context but Inactive in another. Therefore, this operation shall report whether this RTC is either Active, Inactive or in Error; which of those states a component is in with respect to a particular context may be queried from the context itself.
- Returns
- Result of Alive state confirmation
◆ isOwnExecutionContext()
|
static |
[local interface] Checking if the current context is own context
This function checks if the current context is own execution context. This function is assumed to be called from the following functions.
- onStartup()
- onShutdown()
- onActivated()
- onDeactivated()
- onExecute()
- onAborting()
- onError()
- onReset()
- onStateUpdate()
- onRateChanged()
The argument of this function should be the first argument (UniqueId ec_id) of the above functions.
- Parameters
-
ec_id The above functions' first argument "exec_handle."
- Returns
- true: Own context, false: other's context
◆ on_aborting()
|
override |
[ComponentAction CORBA interface] Transition to Error State
The RTC is transitioning from the Active state to the Error state in some execution context. This callback is invoked only a single time for time that the RTC transitions into the Error state from another state. This behavior is in contrast to that of on_error. As a result of this operation, onAborting() callback function is invoked.
- Parameters
-
exec_handle ID of ExecutionContext that transited to the state
- Returns
- The return code of ReturnCode_t type
◆ on_activated()
|
override |
[ComponentAction CORBA interface] Activate RTC
The RTC has been activated in the given execution context. As a result of this operation, onActivated() callback function is called.
- Parameters
-
exec_handle ID of activation ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ on_deactivated()
|
override |
[ComponentAction CORBA interface] Deactivate RTC
The RTC has been deactivated in the given execution context. As a result of this operation, onDeactivated() callback function is called.
- Parameters
-
exec_handle ID of deactivation ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ on_error()
|
override |
[ComponentAction CORBA interface] Error Processing of RTC
The RTC remains in the Error state. If the RTC is in the Error state relative to some execution context when it would otherwise be invoked from that context (according to the context’s ExecutionKind), this callback shall be invoked instead. For example,
- If the ExecutionKind is PERIODIC, this operation shall be invoked in sorted order at the rate of the context instead of DataFlowComponentAction::on_execute and on_state_update.
- If the ExecutionKind is EVENT_DRIVEN, this operation shall be invoked whenever FsmParticipantAction::on_action would otherwise have been invoked. As a result of this operation, onError() callback function is invoked.
- Parameters
-
exec_handle ID of target ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ on_execute()
|
override |
[DataFlowComponentAction CORBA interface] Primary Periodic Operation of RTC
This operation will be invoked periodically at the rate of the given execution context as long as the following conditions hold:
- The RTC is Active.
- The given execution context is Running This callback occurs during the first execution pass. As a result of this operation, onExecute() callback function is invoked.
Constraints
- The execution context of the given context shall be PERIODIC.
- Parameters
-
exec_handle ID of target ExecutionContext for Primary Periodic Operation
- Returns
- The return code of ReturnCode_t type
◆ on_finalize()
|
override |
[ComponentAction CORBA interface] Finalize RTC
The RTC is being destroyed. Any final RTC-specific tear-down logic should be performed here. As a result of this operation, onFinalize() callback function is called.
- Returns
- The return code of ReturnCode_t type
◆ on_initialize()
|
override |
[ComponentAction CORBA interface] Initialize RTC
The RTC has been initialized and entered the Alive state. Any RTC-specific initialization logic should be performed here. As a result of this operation, onInitialize() callback function is called.
- Returns
- The return code of ReturnCode_t type
◆ on_rate_changed()
|
override |
[DataFlowComponentAction CORBA interface] Notify rate changed
This operation is a notification that the rate of the indicated execution context has changed. As a result of this operation, onRateChanged() callback function is called.
Constraints
- The execution context of the given context shall be PERIODIC.
- Parameters
-
exec_handle ID of target ExecutionContext for Operation
- Returns
- The return code of ReturnCode_t type
◆ on_reset()
|
override |
[ComponentAction CORBA interface] Resetting RTC
The RTC is in the Error state. An attempt is being made to recover it such that it can return to the Inactive state. If the RTC was successfully recovered and can safely return to the Inactive state, this method shall complete with ReturnCode_t::OK. Any other result shall indicate that the RTC should remain in the Error state. As a result of this operation, onReset() callback function is invoked.
- Parameters
-
exec_handle ID of target ExecutionContext for the reset
- Returns
- The return code of ReturnCode_t type
◆ on_shutdown()
|
override |
[ComponentAction CORBA interface] Shutdown RTC
The given execution context, in which the RTC is participating, has transitioned from Running to Stopped. As a result of this operation, onShutdown() callback function is called.
- Parameters
-
exec_handle ID of ExecutionContext that transited to the state
- Returns
- The return code of ReturnCode_t type
◆ on_startup()
|
override |
[ComponentAction CORBA interface] Startup RTC
The given execution context, in which the RTC is participating, has transitioned from Stopped to Running. As a result of this operation, onStartup() callback function is called.
- Parameters
-
exec_handle ID of ExecutionContext that transited to the state
- Returns
- The return code of ReturnCode_t type
◆ on_state_update()
|
override |
[DataFlowComponentAction CORBA interface] Secondary Periodic Operation of RTC
This operation will be invoked periodically at the rate of the given execution context as long as the following conditions hold:
- The RTC is Active.
- The given execution context is Running This callback occurs during the second execution pass. As a result of this operation, onStateUpdate() callback function is invoked.
Constraints
- The execution context of the given context shall be PERIODIC.
- Parameters
-
exec_handle ID of target ExecutionContext for Secondary Periodic Operation
- Returns
- The return code of ReturnCode_t type
◆ onAborting()
|
protectedvirtual |
Callback function to abort.
This is a callback function that is executed when ComponentAction::on_aborting was invoked.
As for actual abortion of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ onActivated()
|
protectedvirtual |
Callback function to activate.
This is a callback function that is executed when ComponentAction::on_activated was invoked.
As for actual activation of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
Reimplemented in RTC::PeriodicECSharedComposite.
◆ onAddPort()
|
inline |
References RTC::ADD_PORT, m_actionListeners, and RTC::ComponentActionListeners::notify().
◆ onAttachExecutionContext()
|
inline |
References RTC::EC_ATTACHED, and m_actionListeners.
◆ onDeactivated()
|
protectedvirtual |
Callback function to deactivate.
This is a callback function that is executed when ComponentAction::on_deactivated was invoked.
As for actual deactivation of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
Reimplemented in RTC::PeriodicECSharedComposite.
◆ onDetachExecutionContext()
|
inline |
References RTC::EC_DETACHED, and m_actionListeners.
◆ onError()
|
protectedvirtual |
Callback function for error handling.
This is a callback function that is executed when ComponentAction::on_error was invoked.
As for actual error handling of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ onExecute()
|
protectedvirtual |
Callback function to execute periodically.
This is a callback function that is executed when DataFlowComponentAction::on_execute is invoked.
As for actual periodic execution of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it. This function is invoked periodically as the first execution pass of Two-Pass Execution in Periodic Sampled Data Processing.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ onFinalize()
|
protectedvirtual |
Callback function to finalize.
This is a callback function that is executed when ComponentAction::on_finalize was invoked.
As for actual finalization of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Returns
- The return code of ReturnCode_t type
Reimplemented in RTC::PeriodicECSharedComposite.
◆ onInitialize()
|
protectedvirtual |
Callback function to initialize.
This is a callback function that is executed when ComponentAction::on_initialize was invoked.
As for actual initialization of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Returns
- The return code of ReturnCode_t type
Reimplemented in RTC::PeriodicECSharedComposite.
◆ onRateChanged()
|
protectedvirtual |
Callback function to change execution cycle.
This is a callback function that is executed when DataFlowComponentAction::on_rate_changed was invoked.
As for actual changing execution cycle of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
This function is invoked when the execution of ExecutionContext was updated in Periodic Sampled Data Processing.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ onRemovePort()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::REMOVE_PORT.
◆ onReset()
|
protectedvirtual |
Callback function to reset.
This is a callback function that is executed when ComponentAction::on_reset was invoked.
As for actual reset of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
Reimplemented in RTC::PeriodicECSharedComposite.
◆ onShutdown()
|
protectedvirtual |
Callback function for shutdown action.
Callback function that is executed when ComponentAction::on_shutdown was invoked.
As for actual shutdown of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ onStartup()
|
protectedvirtual |
Callback function for startup action.
Callback function that is executed when ComponentAction::on_startup was invoked.
As for actual startup of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ onStateUpdate()
|
protectedvirtual |
Callback function to update the state.
This is a callback function that is executed when DataFlowComponentAction::on_state_update was invoked.
As for actual updating the state of each component, since this function is dummy-implemented to return RTC::RTC_OK unconditionally, you need to implement this function by overriding it.
This function is invoked periodically as the second execution pass of Two-Pass Execution in Periodic Sampled Data Processing.
- Parameters
-
exec_handle ID of the participant ExecutionContext
- Returns
- The return code of ReturnCode_t type
◆ postOnAborting()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_ABORTING.
◆ postOnActivated()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_ACTIVATED.
◆ postOnDeactivated()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_DEACTIVATED.
◆ postOnError()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_ERROR.
◆ postOnExecute()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_EXECUTE.
◆ postOnFinalize()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_FINALIZE.
◆ postOnFsmDo()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::POST_ON_DO.
◆ postOnFsmEntry()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::POST_ON_ENTRY.
Referenced by RTC::Link< C, P >::entry().
◆ postOnFsmExit()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::POST_ON_EXIT.
Referenced by RTC::Link< C, P >::exit().
◆ postOnFsmInit()
|
inline |
FSM related listeners
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::POST_ON_INIT.
Referenced by RTC::Link< C, P >::init().
◆ postOnFsmStateChange()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::POST_ON_STATE_CHANGE.
Referenced by RTC::Link< C, P >::entry().
◆ postOnInitialize()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_INITIALIZE.
◆ postOnRateChanged()
|
inline |
◆ postOnReset()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_RESET.
◆ postOnShutdown()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_SHUTDOWN.
◆ postOnStartup()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::POST_ON_STARTUP.
◆ postOnStateUpdate()
|
inline |
◆ preOnAborting()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_ABORTING.
◆ preOnActivated()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_ACTIVATED.
◆ preOnDeactivated()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_DEACTIVATED.
◆ preOnError()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_ERROR.
◆ preOnExecute()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_EXECUTE.
◆ preOnFinalize()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_FINALIZE.
◆ preOnFsmDo()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::PRE_ON_DO.
◆ preOnFsmEntry()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::PRE_ON_ENTRY.
Referenced by RTC::Link< C, P >::entry().
◆ preOnFsmExit()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::PRE_ON_EXIT.
Referenced by RTC::Link< C, P >::exit().
◆ preOnFsmInit()
|
inline |
FSM related listeners
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::PRE_ON_INIT.
Referenced by RTC::Link< C, P >::init().
◆ preOnFsmStateChange()
|
inline |
References m_fsmActionListeners, RTC::FsmActionListeners::notify(), and RTC::PRE_ON_STATE_CHANGE.
Referenced by RTC::Link< C, P >::exit().
◆ preOnInitialize()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_INITIALIZE.
◆ preOnRateChanged()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_RATE_CHANGED.
◆ preOnReset()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_RESET.
◆ preOnShutdown()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_SHUTDOWN.
◆ preOnStartup()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_STARTUP.
◆ preOnStateUpdate()
|
inline |
References m_actionListeners, RTC::ComponentActionListeners::notify(), and RTC::PRE_ON_STATE_UPDATE.
◆ readAll()
| bool RTC::RTObject_impl::readAll | ( | ) |
◆ registerInPort()
| void RTC::RTObject_impl::registerInPort | ( | const char * | name, |
| InPortBase & | inport ) |
◆ registerOutPort()
| void RTC::RTObject_impl::registerOutPort | ( | const char * | name, |
| OutPortBase & | outport ) |
◆ registerPort() [1/3]
| void RTC::RTObject_impl::registerPort | ( | CorbaPort & | port | ) |
[local interface] Register Port
This operation registers a Port held by this RTC. In order to enable access to the Port from outside of RTC, the Port must be registered by this operation. The Port that is registered by this operation would be identified by PortProfile.name in the inside of RTC. Therefore, the Port should have unique PortProfile.name in the RTC. The registering Port would be activated properly, and the reference and the object reference would be stored in lists in RTC.
- Parameters
-
port Port which is registered to the RTC
◆ registerPort() [2/3]
| void RTC::RTObject_impl::registerPort | ( | PortBase & | port | ) |
[local interface] Register Port
This operation registers a Port held by this RTC. In order to enable access to the Port from outside of RTC, the Port must be registered by this operation. The Port that is registered by this operation would be identified by PortProfile.name in the inside of RTC. Therefore, the Port should have unique PortProfile.name in the RTC. The registering Port would be activated properly, and the reference and the object reference would be stored in lists in RTC.
- Parameters
-
port Port which is registered to the RTC
◆ registerPort() [3/3]
| void RTC::RTObject_impl::registerPort | ( | PortService_ptr | port | ) |
[local interface] Register Port
This operation registers a Port held by this RTC. In order to enable access to the Port from outside of RTC, the Port must be registered by this operation. The Port that is registered by this operation would be identified by PortProfile.name in the inside of RTC. Therefore, the Port should have unique PortProfile.name in the RTC. The registering Port would be activated properly, and the reference and the object reference would be stored in lists in RTC.
- Parameters
-
port Port which is registered to the RTC
◆ removeConfigurationParamListener()
| void RTC::RTObject_impl::removeConfigurationParamListener | ( | ConfigurationParamListenerType | type, |
| ConfigurationParamListener * | listener ) |
Removing ConfigurationParamListener.
This function removes a listener object which is added by addConfigurationParamListener() function.
- Parameters
-
type ConfigurationParamListenerType value ON_UPDATE_CONFIG_PARAM is only allowed. listener a pointer to ConfigurationParamListener listener object.
◆ removeConfigurationSetListener()
| void RTC::RTObject_impl::removeConfigurationSetListener | ( | ConfigurationSetListenerType | type, |
| ConfigurationSetListener * | listener ) |
Removing ConfigurationSetListener.
This function removes a listener object which is added by addConfigurationSetListener() function.
- Parameters
-
type ConfigurationSetListenerType value listener a pointer to ConfigurationSetListener listener object.
◆ removeConfigurationSetNameListener()
| void RTC::RTObject_impl::removeConfigurationSetNameListener | ( | ConfigurationSetNameListenerType | type, |
| ConfigurationSetNameListener * | listener ) |
Removing ConfigurationSetNameListener.
This function removes a listener object which is added by addConfigurationSetNameListener() function.
- Parameters
-
type ConfigurationSetNameListenerType value ON_UPDATE_CONFIG_PARAM is only allowed. listener a pointer to ConfigurationSetNameListener listener object.
◆ removeExecutionContextActionListener()
| void RTC::RTObject_impl::removeExecutionContextActionListener | ( | ECActionListenerType | listener_type, |
| ECActionListener * | listener ) |
Removing ExecutionContextAction type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removeFsmProfileListener()
| void RTC::RTObject_impl::removeFsmProfileListener | ( | FsmProfileListenerType | listener_type, |
| FsmProfileListener * | listener ) |
Removing FsmProfile type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removeFsmStructureListener()
| void RTC::RTObject_impl::removeFsmStructureListener | ( | FsmStructureListenerType | listener_type, |
| FsmStructureListener * | listener ) |
Removing FsmStructure type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removeInPort()
| bool RTC::RTObject_impl::removeInPort | ( | InPortBase & | inport | ) |
◆ removeOutPort()
| bool RTC::RTObject_impl::removeOutPort | ( | OutPortBase & | outport | ) |
◆ removePort() [1/3]
| bool RTC::RTObject_impl::removePort | ( | CorbaPort & | port | ) |
[local interface] Unregister Port
This operation unregisters a Port held by this RTC.
- Parameters
-
port Port which is unregistered
- Returns
- Unregister result (Successful:true, Failed:false)
◆ removePort() [2/3]
| bool RTC::RTObject_impl::removePort | ( | PortBase & | port | ) |
[local interface] Unregister Port
This operation unregisters a Port held by this RTC.
- Parameters
-
port Port which is unregistered
- Returns
- Unregister result (Successful:true, Failed:false)
◆ removePort() [3/3]
| bool RTC::RTObject_impl::removePort | ( | PortService_ptr | port | ) |
[local interface] Unregister Port
This operation unregisters a Port held by this RTC.
- Parameters
-
port Port which is unregistered
- Returns
- Unregister result (Successful:true, Failed:false)
◆ removePortActionListener()
| void RTC::RTObject_impl::removePortActionListener | ( | PortActionListenerType | listener_type, |
| PortActionListener * | listener ) |
Removing PortAction type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removePortConnectListener()
| void RTC::RTObject_impl::removePortConnectListener | ( | PortConnectListenerType | listener_type, |
| PortConnectListener * | listener ) |
Removing PortConnect type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removePortConnectRetListener()
| void RTC::RTObject_impl::removePortConnectRetListener | ( | PortConnectRetListenerType | listener_type, |
| PortConnectRetListener * | listener ) |
Removing PortConnectRet type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removePostComponentActionListener()
| void RTC::RTObject_impl::removePostComponentActionListener | ( | PostComponentActionListenerType | listener_type, |
| PostComponentActionListener * | listener ) |
Removing PostComponentAction type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removePostFsmActionListener()
| void RTC::RTObject_impl::removePostFsmActionListener | ( | PostFsmActionListenerType | listener_type, |
| PostFsmActionListener * | listener ) |
Removing PostFsmAction type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removePreComponentActionListener()
| void RTC::RTObject_impl::removePreComponentActionListener | ( | PreComponentActionListenerType | listener_type, |
| PreComponentActionListener * | listener ) |
Removing PreComponentAction type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removePreFsmActionListener()
| void RTC::RTObject_impl::removePreFsmActionListener | ( | PreFsmActionListenerType | listener_type, |
| PreFsmActionListener * | listener ) |
Removing PreFsmAction type listener.
This operation removes a specified listener.
- Parameters
-
listener_type A listener type listener A pointer to a listener object
◆ removeSdoServiceConsumer()
| bool RTC::RTObject_impl::removeSdoServiceConsumer | ( | const char * | id | ) |
[local interface] Remove a SDO service provider
◆ removeSdoServiceConsumerStartThread()
| void RTC::RTObject_impl::removeSdoServiceConsumerStartThread | ( | const char * | id | ) |
[local interface] Remove a SDO service provider
◆ removeSdoServiceProvider()
| bool RTC::RTObject_impl::removeSdoServiceProvider | ( | const char * | id | ) |
[local interface] Remove a SDO service provider
◆ reset()
| ReturnCode_t RTC::RTObject_impl::reset | ( | RTC::UniqueId | ec_id | ) |
[local interface] Resetting and go to Inactive state
This function reset RTC and makes transition from Error to Inactive state. This function is assumed to be called from the following functions.
The argument of this function should be the first argument (UniqueId ec_id) of the above function.
- Parameters
-
ec_id The above functions' first argument "exec_handle."
- Returns
- Return code
◆ setExecutionRate()
| ReturnCode_t RTC::RTObject_impl::setExecutionRate | ( | RTC::UniqueId | ec_id, |
| double | rate ) |
[local interface] Setting current context' execution rate
This function sets a execution rate in the context. If this context's kind is not PERIODC, behavior is not defined. This function is assumed to be called from the following functions.
- onStartup()
- onShutdown()
- onActivated()
- onDeactivated()
- onExecute()
- onAborting()
- onError()
- onReset()
- onStateUpdate()
- onRateChanged()
The argument of this function should be the first argument (UniqueId ec_id) of the above functions.
- Parameters
-
ec_id The above functions' first argument "exec_handle." rate Execution rate in [Hz].
◆ setINSObjRef()
| void RTC::RTObject_impl::setINSObjRef | ( | RTC::LightweightRTObject_ptr | obj | ) |
◆ setInstanceName()
| void RTC::RTObject_impl::setInstanceName | ( | const char * | instance_name | ) |
[local interface] Set instance name
Set the instance name specified in ComponentProfile.
- Parameters
-
instance_name Instance name
◆ setObjRef()
| void RTC::RTObject_impl::setObjRef | ( | RTObject_ptr | rtobj | ) |
[local interface] Set the object reference
Set RTC's CORBA object reference.
- Parameters
-
rtobj The object reference
◆ setProperties()
| void RTC::RTObject_impl::setProperties | ( | const coil::Properties & | prop | ) |
◆ setReadAll()
| void RTC::RTObject_impl::setReadAll | ( | bool | read = true, |
| bool | completion = false ) |
Set whether to execute the readAll() method.
Set whether to execute the readAll() method.
- Parameters
-
read(default:true) (readAll() is called:true, readAll() isn't called:false) completion(default:false) All InPort::read() calls are completed.:true, If one InPort::read() is False, return false.:false completion(default:false)
◆ setWriteAll()
| void RTC::RTObject_impl::setWriteAll | ( | bool | write = true, |
| bool | completion = false ) |
Set whether to execute the writeAll() method.
Set whether to execute the writeAll() method.
- Parameters
-
write(default:true) (writeAll() is called:true, writeAll() isn't called:false) completion(default:false) All OutPort::write() calls are completed.:true, If one OutPort::write() is False, return false.:false
◆ shutdown()
|
protected |
◆ startMineEC()
|
protected |
Starting my EC This function start mine ECs. This is called from only initialize().
◆ updateParameters()
| void RTC::RTObject_impl::updateParameters | ( | const char * | config_set | ) |
Update configuration parameters (by ID)
Update configuration parameter value by the value that set to a configuration set of specified ID.
- Parameters
-
config_set The target configuration set's ID for setup
◆ writeAll()
| bool RTC::RTObject_impl::writeAll | ( | ) |
Member Data Documentation
◆ m_actionListeners
|
protected |
ComponentActionListener holder.
Holders of ComponentActionListeners
Referenced by onAddPort(), onAttachExecutionContext(), onDetachExecutionContext(), onRemovePort(), postOnAborting(), postOnActivated(), postOnDeactivated(), postOnError(), postOnExecute(), postOnFinalize(), postOnInitialize(), postOnRateChanged(), postOnReset(), postOnShutdown(), postOnStartup(), postOnStateUpdate(), preOnAborting(), preOnActivated(), preOnDeactivated(), preOnError(), preOnExecute(), preOnFinalize(), preOnInitialize(), preOnRateChanged(), preOnReset(), preOnShutdown(), preOnStartup(), and preOnStateUpdate().
◆ m_configsets
|
protected |
Configuration Administrator Object .
Referenced by bindParameter(), and getConfigService().
◆ m_created
|
protected |
Created Status Flag .
◆ m_eclist
|
protected |
List of ExecutionContextBase .
◆ m_ecMine
|
protected |
List of owned ExecutionContextService .
◆ m_ecOther
|
protected |
List of participating ExecutionContextService .
◆ m_exiting
|
protected |
RTC Finalize Status Flag .
◆ m_fsmActionListeners
|
protected |
ComponentActionListener holder.
Holders of ComponentActionListeners
Referenced by postOnFsmDo(), postOnFsmEntry(), postOnFsmExit(), postOnFsmInit(), postOnFsmStateChange(), preOnFsmDo(), preOnFsmEntry(), preOnFsmExit(), preOnFsmInit(), and preOnFsmStateChange().
◆ m_inports
|
protected |
List of InPortBase* .
Referenced by getInPorts().
◆ m_insref
|
protected |
◆ m_objref
|
protected |
Object reference .
◆ m_outports
|
protected |
List of OutPortBase* .
Referenced by getOutPorts().
◆ m_pManager
◆ m_pORB
|
protected |
The pointer to the ORB .
◆ m_portAdmin
|
protected |
List of Port Object reference .
◆ m_portconnListeners
|
protected |
PortConnectListener holder.
Holders of PortConnectListeners
◆ m_pPOA
|
protected |
The pointer to the POA .
◆ m_profile
|
protected |
ComponentProfile .
Referenced by getCategory(), getDescription(), getInstanceName(), getTypeName(), getVendor(), and getVersion().
◆ m_properties
|
protected |
RTC's Property .
◆ m_pSdoConfig
|
protected |
The pointer to the SDO Configuration Interface .
◆ m_pSdoConfigImpl
|
protected |
The pointer to the SDO Configuration Object .
◆ m_readAll
|
protected |
flag for readAll()
◆ m_readAllCompletion
|
protected |
◆ m_sdoconterm
|
protected |
◆ m_sdoOrganizations
|
protected |
SDO organization .
◆ m_sdoOwnedOrganizations
|
protected |
SDO owned organization list .
◆ m_sdoservice
|
protected |
SDO Service Administrator Object .
◆ m_sdoStatus
|
protected |
SDO Status .
◆ m_writeAll
|
protected |
flag for writeAll()
◆ m_writeAllCompletion
|
protected |
flag for writeAll()
true:Even if the error occurs during writeAll(), it executes it to the last minute. false:End when error occurs during writeAll().
◆ rtclog
The documentation for this class was generated from the following file:
Generated by