#include <Manager.h>
Classes | |
| struct | ECFactoryPredicate |
| class | FactoryPredicate |
| struct | Finalized |
| struct | InstanceName |
| struct | ModuleFactories |
| class | ModulePredicate |
Public Types | |
| using | TaskId = coil::Timer<coil::PeriodicFunction>::TaskId |
Public Member Functions | |
| void | join () |
| Wait for Manager's termination. | |
| LogStreamBuf & | getLogStreamBuf () |
| Get the log buffer. | |
| std::string & | getLogLevel () |
| Get the log level of the configuration. | |
| coil::Properties & | getConfig () |
| Get the manager configuration. | |
| void | setModuleInitProc (ModuleInitProc proc) |
| Set initial procedure. | |
| bool | activateManager () |
| Activate the Manager. | |
| void | runManager (bool no_block=false) |
| Run the Manager. | |
| TaskId | addTask (std::function< void(void)> fn, std::chrono::nanoseconds period) |
| Add a task to the Manager timer. | |
| void | invoke (std::function< void(void)> fn, std::chrono::nanoseconds delay=std::chrono::seconds::zero()) |
| Run a function on the Manager main thread. | |
| ReturnCode_t | load (const std::string &fname, const std::string &initfunc) |
| [CORBA interface] Load module | |
| void | unload (const char *fname) |
| Unload module. | |
| void | unloadAll () |
| Unload all modules. | |
| std::vector< coil::Properties > | getLoadedModules () |
| Get a list of loaded modules. | |
| std::vector< coil::Properties > | getLoadableModules () |
| Get a list of loadable modules. | |
| bool | registerFactory (coil::Properties &profile, RtcNewFunc new_func, RtcDeleteFunc delete_func) |
| Register RT-Component Factory. | |
| std::vector< coil::Properties > | getFactoryProfiles () |
| Get profiles of factories. | |
| bool | registerECFactory (const char *name, ECNewFunc new_func, ECDeleteFunc delete_func) |
| Register ExecutionContext Factory. | |
| std::vector< std::string > | getModulesFactories () |
| Get the list of all Factories. | |
| RTObject_impl * | createComponent (const char *comp_args) |
| Create RT-Components. | |
| ExecutionContextBase * | createContext (const char *ec_args) |
| Create Context. | |
| void | cleanupComponent (RTObject_impl *comp) |
| Unregister RT-Components. | |
| void | cleanupComponents () |
| This method deletes RT-Components. | |
| void | notifyFinalized (RTObject_impl *comp) |
| This method deletes RT-Components. | |
| bool | registerComponent (RTObject_impl *comp) |
| Register RT-Component directly without Factory. | |
| bool | unregisterComponent (RTObject_impl *comp) |
| Unregister RT-Components. | |
| void | deleteComponent (RTObject_impl *comp) |
| Unregister RT-Components that have been registered to Manager. | |
| void | deleteComponent (const char *instance_name) |
| Unregister RT-Components that have been registered to Manager. | |
| RTObject_impl * | getComponent (const char *instance_name) |
| Get RT-Component's pointer. | |
| std::vector< RTObject_impl * > | getComponents () |
| Get all RT-Components registered in the Manager. | |
| void | addManagerActionListener (RTM::ManagerActionListener *listener, bool autoclean=true) |
| void | removeManagerActionListener (RTM::ManagerActionListener *listener) |
| void | addModuleActionListener (RTM::ModuleActionListener *listener, bool autoclean=true) |
| void | removeModuleActionListener (RTM::ModuleActionListener *listener) |
| void | addRtcLifecycleActionListener (RTM::RtcLifecycleActionListener *listener, bool autoclean=true) |
| void | removeRtcLifecycleActionListener (RTM::RtcLifecycleActionListener *listener) |
| void | addNamingActionListener (RTM::NamingActionListener *listener, bool autoclean=true) |
| void | removeNamingActionListener (RTM::NamingActionListener *listener) |
| void | addLocalServiceActionListener (RTM::LocalServiceActionListener *listener, bool autoclean=true) |
| void | removeLocalServiceActionListener (RTM::LocalServiceActionListener *listener) |
| CORBA::ORB_ptr | theORB () |
| Get the pointer to ORB (ownership retained) | |
| CORBA::ORB_ptr | getORB () |
| Get the pointer to ORB (ownership duplicated) | |
| PortableServer::POA_ptr | thePOA () |
| Get a pointer to RootPOA held by Manager. | |
| PortableServer::POA_ptr | getPOA () |
| Get a pointer to RootPOA held by Manager. | |
| PortableServer::POAManager_ptr | thePOAManager () |
| Get POAManager that Manager has (ownership retained) | |
| PortableServer::POAManager_ptr | getPOAManager () |
| Get POAManager that Manager has (ownership duplicated) | |
| RTM::ManagerServant & | getManagerServant () |
| Getting ManagerServant. | |
| bool | initLocalService () |
| LocalService initialization. | |
| NamingManager * | getNaming () |
| Getting NamingManager. | |
Static Public Member Functions | |
| static Manager * | init (int argc, char **argv) |
| Initialize manager. | |
| static Manager & | instance () |
| Get instance of the manager. | |
| static void | terminate () |
| Terminate manager. | |
| static void | removeTask (TaskId id) |
| Remove the task from the Manager timer. | |
Protected Types | |
| using | ComponentManager |
| using | FactoryManager |
| ComponentFactory . | |
| using | ECFactoryManager |
Protected Member Functions | |
| Manager () | |
| Protected Constructor. | |
| Manager (const Manager &)=delete | |
| Manager & | operator= (const Manager &)=delete |
| void | initManager (int argc, char **argv) |
| Manager internal initialization. | |
| void | shutdown () |
| Shutdown Manager. | |
| void | mainThread () |
| The main function of Manager main thread. . | |
| void | initLogstreamFile () |
| void | initLogstreamPlugins () |
| void | initLogstreamOthers () |
| bool | initLogger () |
| System logger initialization. | |
| void | shutdownLogger () |
| System Logger finalization. | |
| void | shutdownManagerServant () |
| Manager Servant finalization. | |
| bool | initORB () |
| CORBA ORB initialization. | |
| std::string | createORBOptions () |
| Create ORB command options. | |
| void | createORBEndpoints (coil::vstring &endpoints) |
| Create Endpoints. | |
| void | createORBEndpointOption (std::string &opt, coil::vstring endpoints) |
| Create a command optional line of Endpoint of ORB. | |
| void | shutdownORB () |
| ORB finalization. | |
| bool | initNaming () |
| NamingManager initialization. | |
| void | shutdownNaming () |
| NamingManager finalization. | |
| NamingManager & | getNamingManager () |
| Getting NamingManager. | |
| void | shutdownComponents () |
| NamingManager finalization. | |
| bool | procComponentArgs (const char *comp_arg, coil::Properties &comp_id, coil::Properties &comp_conf) |
| Extracting component type/properties from the given string. | |
| bool | procContextArgs (const char *ec_args, std::string &ec_id, coil::Properties &ec_conf) |
| Extracting ExecutionContext's name/properties from the given string. | |
| void | configureComponent (RTObject_impl *comp, const coil::Properties &prop) |
| Configure RT-Component. | |
| bool | initExecContext () |
| ExecutionContextManager initialization. | |
| bool | initComposite () |
| PeriodicECSharedComposite initialization. | |
| bool | initFactories () |
| Factories initialization. | |
| void | initCpuAffinity () |
| void | initPreConnection () |
| void | initPreActivation () |
| void | initPreCreation () |
| void | invokeInitProc () |
| void | publishPorts (RTObject_impl *comp) |
| void | subscribePorts (RTObject_impl *comp) |
| PortServiceList * | getPortsOnNameServers (const std::string &nsname, const std::string &kind) |
| void | connectDataPorts (PortService_ptr port, PortServiceList_var &target_ports) |
| void | connectServicePorts (PortService_ptr port, PortServiceList_var &target_ports) |
| bool | initManagerServant () |
| ManagerServant initialization. | |
| bool | mergeProperty (coil::Properties &prop, const char *file_name) |
| Merge property information. | |
| std::string | formatString (const char *naming_format, coil::Properties &prop) |
| Construct registration information when registering to Naming server. | |
| void | setEndpointProperty (CORBA::Object_ptr objref) |
| Setting endpoint info from corba.endpoints . | |
| void | endpointPropertySwitch (const std::string &ipver, bool &ip, std::vector< int > &ip_list) |
| Getting option info from corba.endpoint_property . | |
Protected Attributes | |
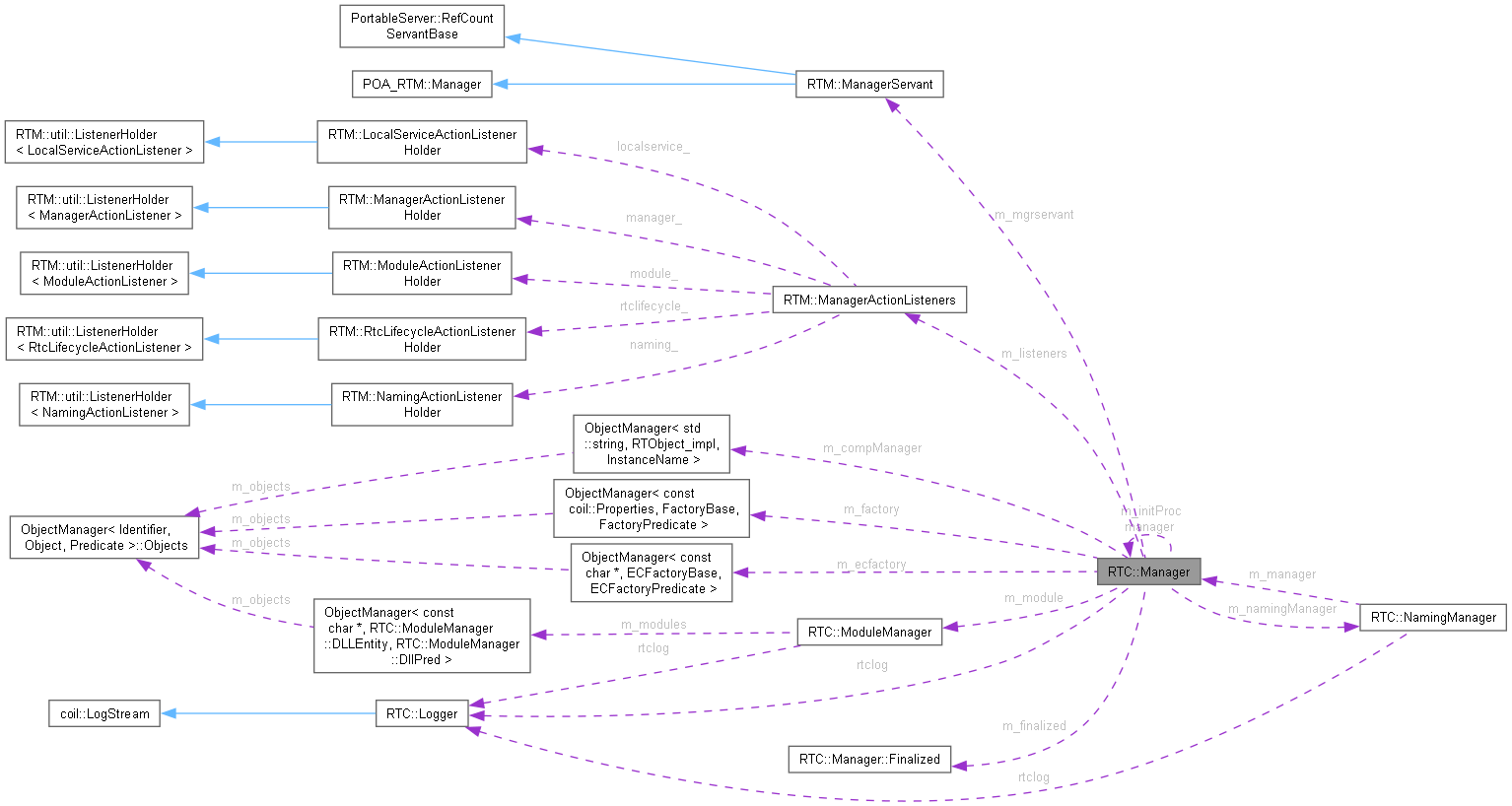
| RTM::ManagerServant * | m_mgrservant {nullptr} |
| The pointer to the ManagerServant . | |
| CORBA::ORB_var | m_pORB |
| The pointer to the ORB . | |
| PortableServer::POA_var | m_pPOA |
| The pointer to the POA . | |
| PortableServer::POAManager_var | m_pPOAManager |
| The pointer to the POAManager . | |
| coil::Argv | m_argv |
| The argument of ORB_init . | |
| int | m_argvSize |
| The argument of ORB_init . | |
| ModuleInitProc | m_initProc {nullptr} |
| User's initialization function's pointer . | |
| coil::Properties | m_config |
| Managaer's configuration Properties . | |
| ModuleManager * | m_module {nullptr} |
| The pointer to the ModuleManager . | |
| NamingManager * | m_namingManager {nullptr} |
| The pointer to the NamingManager . | |
| coil::Timer< coil::DelayedFunction > | m_invoker |
| Timer Object for delay call on the Manager thread . | |
| coil::Timer< coil::PeriodicFunction > | m_scheduler |
| Timer Object for delay call on the Manager thread . | |
| std::thread | m_threadOrb |
| ORB thread. . | |
| std::thread | m_threadMain |
| Manager main thread. . | |
| std::list< coil::SignalAction > | m_signals |
| An array for signals management . | |
| bool | m_needsTimer {false} |
| A flag that Manager use Timer or not. . | |
| LogStreamBuf | m_logStreamBuf |
| Logger buffer . | |
| Logger | rtclog {&m_logStreamBuf} |
| Logger stream . | |
| std::vector< std::filebuf * > | m_logfiles |
| Files for log output . | |
| ComponentManager | m_compManager |
| ComponentManager . | |
| FactoryManager | m_factory |
| ComponentManager . | |
| ECFactoryManager | m_ecfactory |
| ExecutionContext Manager . | |
| std::vector< ExecutionContextBase * > | m_ecs |
| ExecutionContext list . | |
| Finalized | m_finalized |
| ::RTM::ManagerActionListeners | m_listeners |
Static Protected Attributes | |
| static Manager * | manager |
| The pointer to the Manager . | |
| static std::mutex | mutex |
| The mutex of the pointer to the Manager . | |
| static std::atomic_flag | m_isRunning |
| A flag to stop the main thread. . | |
Detailed Description
Manager class.
This is a manager class that manages various information such as components.
- Since
- 0.2.0
Member Typedef Documentation
◆ ComponentManager
|
protected |
◆ ECFactoryManager
|
protected |
◆ FactoryManager
|
protected |
ComponentFactory .
◆ TaskId
| using RTC::Manager::TaskId = coil::Timer<coil::PeriodicFunction>::TaskId |
Constructor & Destructor Documentation
◆ Manager() [1/2]
|
protected |
Protected Constructor.
Protected Constructor
◆ Manager() [2/2]
|
protecteddelete |
Member Function Documentation
◆ activateManager()
| bool RTC::Manager::activateManager | ( | ) |
Activate the Manager.
This operation do the following:
- Activate CORBA POAManager
- Activate Manager CORBA object
- Bind object reference of the Manager to the nameserver
This operation should be invoked after Manager:init(), and before runManager().
- Returns
- Activation result (Successful:true, Failed:false)
◆ addLocalServiceActionListener()
| void RTC::Manager::addLocalServiceActionListener | ( | RTM::LocalServiceActionListener * | listener, |
| bool | autoclean = true ) |
◆ addManagerActionListener()
| void RTC::Manager::addManagerActionListener | ( | RTM::ManagerActionListener * | listener, |
| bool | autoclean = true ) |
◆ addModuleActionListener()
| void RTC::Manager::addModuleActionListener | ( | RTM::ModuleActionListener * | listener, |
| bool | autoclean = true ) |
◆ addNamingActionListener()
| void RTC::Manager::addNamingActionListener | ( | RTM::NamingActionListener * | listener, |
| bool | autoclean = true ) |
◆ addRtcLifecycleActionListener()
| void RTC::Manager::addRtcLifecycleActionListener | ( | RTM::RtcLifecycleActionListener * | listener, |
| bool | autoclean = true ) |
◆ addTask()
| TaskId RTC::Manager::addTask | ( | std::function< void(void)> | fn, |
| std::chrono::nanoseconds | period ) |
Add a task to the Manager timer.
This operation add a function or functional object to Manger's timer. It run until removeTask(). DO NOT block (Ex. sleep) in the registerd function.
- Parameters
-
fn The Function run periodically. period Period of fn execution.
- Returns
- id: ID for removetask().
◆ cleanupComponent()
| void RTC::Manager::cleanupComponent | ( | RTObject_impl * | comp | ) |
Unregister RT-Components.
Unregister specified RT-Component's instances from naming service.
- Parameters
-
comp Target RT-Components for the unregistration
◆ cleanupComponents()
| void RTC::Manager::cleanupComponents | ( | ) |
This method deletes RT-Components.
This method deletes RT-Components registered by notifyFinalized().
◆ configureComponent()
|
protected |
Configure RT-Component.
Read property files described each RT-Component's type and instance, and configure it to the component. Also, get each component's registered name when registering to NamingService and configure it.
- Parameters
-
comp Target RT-Component for the configuration
◆ connectDataPorts()
|
protected |
- Parameters
-
port target_ports
◆ connectServicePorts()
|
protected |
- Parameters
-
port target_ports
◆ createComponent()
| RTObject_impl * RTC::Manager::createComponent | ( | const char * | comp_args | ) |
Create RT-Components.
Create specified RT-Component's instances via registered Factory. When its instances have been created successfully, the following processings are also executed.
- Read and set configuration information that was set by external file.
- Bind ExecutionContext and start operation.
- Register to naming service.
- Parameters
-
module_name Target RT-Component names for the creation
- Returns
- Created RT-Component's instances
◆ createContext()
| ExecutionContextBase * RTC::Manager::createContext | ( | const char * | ec_args | ) |
Create Context.
- Returns
- Created Context's instances
◆ createORBEndpointOption()
|
protected |
Create a command optional line of Endpoint of ORB.
- Parameters
-
opt ORB options endpoint Endpoints list
◆ createORBEndpoints()
|
protected |
Create Endpoints.
Create Endpoints from the configuration.
- Parameters
-
endpoints Endpoints list
◆ createORBOptions()
|
protected |
Create ORB command options.
Create ORB launch options from configuration information that has been set.
- Returns
- ORB launch options
◆ deleteComponent() [1/2]
| void RTC::Manager::deleteComponent | ( | const char * | instance_name | ) |
Unregister RT-Components that have been registered to Manager.
Unregister RT-Components that have been registered to manager Remove specified RT-Component from naming service, terminate itself and release its instances.
- Parameters
-
instance_name Target RT-Component's instances for the unregistration
◆ deleteComponent() [2/2]
| void RTC::Manager::deleteComponent | ( | RTObject_impl * | comp | ) |
Unregister RT-Components that have been registered to Manager.
Unregister RT-Components that have been registered to manager Remove specified RT-Component from naming service, terminate itself and release its instances.
- Parameters
-
comp Target RT-Component's instances for the unregistration
◆ endpointPropertySwitch()
|
protected |
Getting option info from corba.endpoint_property .
◆ formatString()
|
protected |
Construct registration information when registering to Naming server.
Construct information when registering to NameServer based on specified format and property information. Each format specification character means as follows:
- % : Break of Context
- n : Instance's name
- t : Type name
- m : Type name
- v : Version
- V : Vender
- c : Category
- h : Host name
- M : Manager name
- p : Process ID
- Parameters
-
naming_format Format specification for NamingService registration prop Property information that is used
- Returns
- Specification format conversion result
◆ getComponent()
| RTObject_impl * RTC::Manager::getComponent | ( | const char * | instance_name | ) |
Get RT-Component's pointer.
Search RT-Component that has been registered to Manager by its specified name, and get it that matches.
- Parameters
-
instance_name Target RT-Component's name for searching
- Returns
- Target RT-Component's instances that matches
◆ getComponents()
| std::vector< RTObject_impl * > RTC::Manager::getComponents | ( | ) |
◆ getConfig()
|
inline |
◆ getFactoryProfiles()
| std::vector< coil::Properties > RTC::Manager::getFactoryProfiles | ( | ) |
Get profiles of factories.
Get profiles of factories.
- Returns
- profiles of factories
◆ getLoadableModules()
| std::vector< coil::Properties > RTC::Manager::getLoadableModules | ( | ) |
Get a list of loadable modules.
Get loadable module list. (Currently, unimplemented on ModuleManager side)
- Returns
- Loadable module list
◆ getLoadedModules()
| std::vector< coil::Properties > RTC::Manager::getLoadedModules | ( | ) |
Get a list of loaded modules.
Get module list that is currently loaded into manager.
- Returns
- Module list that has been loaded.
◆ getLogLevel()
|
inline |
◆ getLogStreamBuf()
|
inline |
Get the log buffer.
Get the log buffer that has been set to manager.
- Returns
- Log buffer to set to manager
References m_logStreamBuf.
◆ getManagerServant()
| RTM::ManagerServant & RTC::Manager::getManagerServant | ( | ) |
Getting ManagerServant.
◆ getModulesFactories()
| std::vector< std::string > RTC::Manager::getModulesFactories | ( | ) |
Get the list of all Factories.
Get the list of all factories that have been registered.
- Returns
- Registered factory list
◆ getNaming()
| NamingManager * RTC::Manager::getNaming | ( | ) |
Getting NamingManager.
- Returns
- NamingManager
◆ getNamingManager()
|
protected |
Getting NamingManager.
◆ getORB()
| CORBA::ORB_ptr RTC::Manager::getORB | ( | ) |
Get the pointer to ORB (ownership duplicated)
Get the pointer to ORB that has been set to Manager. The ownership is copied (the reference count is incremented.), calling side also obtains reference ownership. The obtained reference must be released after use. Usually it is recommended that return value are assigned to _var type variables are wonership would be released automatically.
{ CORBA::ORB_var orb = Manager::instance().getORB(); orb->string_to_object(<IOR string>); } // ORB's reference in orb is released here.
- Returns
- ORB object
Referenced by CORBA_SeqUtil::refToVstring().
◆ getPOA()
| PortableServer::POA_ptr RTC::Manager::getPOA | ( | ) |
Get a pointer to RootPOA held by Manager.
Get the pointer to RootPOA that has been set to Manager. The ownership is copied (the reference count is incremented.), calling side also obtains reference ownership. The obtained reference must be released after use. Usually it is recommended that return value are assigned to _var type variables are wonership would be released automatically.
{ PortableServer::POA_var poa = Manager::instance().getPOA();; poa->servant_to_id(m_servant); } // POA's reference in orb is released here.
- Returns
- RootPOA object
◆ getPOAManager()
| PortableServer::POAManager_ptr RTC::Manager::getPOAManager | ( | ) |
Get POAManager that Manager has (ownership duplicated)
Get POAMAnager that has been set to Manager. The ownership is copied (the reference count is incremented.), calling side also obtains reference ownership. The obtained reference must be released after use. Usually it is recommended that return value are assigned to _var type variables are wonership would be released automatically.
{ PortableServer::POAManager_var poam; poam = = Manager::instance().getPOAManager(); poam->activate(); } // POAManager's reference in orb is released here.
- Returns
- POA manager
◆ getPortsOnNameServers()
|
protected |
- Parameters
-
comp
◆ init()
|
static |
Initialize manager.
This is the static member function to initialize the Manager. The Manager is initialized by given commandline arguments. To use the manager, this initialization member function init() must be called. The manager has two static functions to get the instance such as init() and instance(). Since initializing process is only performed by the init() function, the init() has to be called at the beginning of the lifecycle of the Manager.
*Initialization of manager
- initManager: Argument processing, reading config file, initialization of subsystem
- initLogger: Initialization of Logger
- initORB: Initialization of ORB
- initNaming: Initialization of NamingService
- initExecutionContext: Initialization of ExecutionContext factory
- initTimer: Initialization of Timer
- Parameters
-
argc The number of command line arguments. argv The array of the command line arguments.
- Returns
- Reference of the unique instance of Manager
◆ initComposite()
|
protected |
PeriodicECSharedComposite initialization.
- Returns
- PeriodicECSharedComposite initialization result (Successful:true, Failed:false)
◆ initCpuAffinity()
|
protected |
◆ initExecContext()
|
protected |
ExecutionContextManager initialization.
Initialize each ExecutionContext that is used, and register each ExecutionContext creation Factory to ExecutionContextManager.
- Returns
- ExecutionContextManager initialization result (Successful:true, Failed:false)
◆ initFactories()
|
protected |
Factories initialization.
Initialize buffer factories, thread factories, publisher factories, provider factories, and consumer factories.
- Returns
- PeriodicECSharedComposite initialization result (Successful:true, Failed:false)
◆ initLocalService()
| bool RTC::Manager::initLocalService | ( | ) |
LocalService initialization.
- Returns
- Timer Initialization result (Successful:true, Failed:false)
◆ initLogger()
|
protected |
System logger initialization.
Initialize System logger. Initialize logger and set it according to the set information in configuration file,
- Returns
- Initialization result (Successful:true, Failed:false)
◆ initLogstreamFile()
|
protected |
◆ initLogstreamOthers()
|
protected |
◆ initLogstreamPlugins()
|
protected |
◆ initManager()
|
protected |
◆ initManagerServant()
|
protected |
ManagerServant initialization.
- Returns
- Timer Initialization result (Successful:true, Failed:false)
◆ initNaming()
|
protected |
NamingManager initialization.
Initialize NamingManager . However, operate nothing, if it is set to property that NamingManager is not used. Register default NamingServer that is set to property information, when NamingManager is used. Also, launch a timer that updates information automatically at specified cycle and register the method for the update to the timer, when it is set to update it reguraly.
- Returns
- Initialization result (Successful:true, Failed:false)
◆ initORB()
|
protected |
CORBA ORB initialization.
Initialize ORB based on the configuration given by arguments.
- Returns
- ORB initialization result (Successful:true, Failed:false)
◆ initPreActivation()
|
protected |
◆ initPreConnection()
|
protected |
◆ initPreCreation()
|
protected |
◆ instance()
|
static |
Get instance of the manager.
This is the static member function to get the instance of the Manager. Before calling this function, ensure that the initialization function "init()" is called.
- Returns
- The only instance reference of the manager
Referenced by CORBA_SeqUtil::refToVstring().
◆ invoke()
| void RTC::Manager::invoke | ( | std::function< void(void)> | fn, |
| std::chrono::nanoseconds | delay = std::chrono::seconds::zero() ) |
◆ invokeInitProc()
|
protected |
◆ join()
| void RTC::Manager::join | ( | ) |
◆ load()
| ReturnCode_t RTC::Manager::load | ( | const std::string & | fname, |
| const std::string & | initfunc ) |
[CORBA interface] Load module
Load specified module (shared library, DLL etc..), and invoke initialize function.
- Parameters
-
fname The module file name initfunc The initialize function name
- Returns
- Return code RTC::RTC_OK Normal return RTC::RTC_ERROR Load failed, or unknown error RTC::PRECONDITION_NOT_MET Not allowed operation by conf RTC::BAD_PARAMETER Invalid parameter
◆ mainThread()
|
protected |
The main function of Manager main thread. .
◆ mergeProperty()
|
protected |
Merge property information.
Load property information that is configured in the specified file, and merge existing properties that has been configured.
- Parameters
-
prop Target properties for the merge file_name File name that property information is described
- Returns
- Merge result (Successful:true, Failed:false)
◆ notifyFinalized()
| void RTC::Manager::notifyFinalized | ( | RTObject_impl * | comp | ) |
This method deletes RT-Components.
The deleted RT-Component is registered. The registered RT-Components are deleted by cleanupComponents().
- Parameters
-
Deleted RT component
◆ operator=()
◆ procComponentArgs()
|
protected |
Extracting component type/properties from the given string.
This operation extracts component type name and its properties from the figen character string. The given string formats is the following.
[RTC type]?[key(0)]=[val(0)]&[key(1)]=[val(1)]...[key(n)]=[val(n)]
Returned value "comp_id" has keys of "vendor", "category", "implementation_id", "version", and returned as Properties type object. "comp_conf" is returned as Properties type object includeing component properties to be given to component.
- Returns
- comp_arg false will returned if no component type in arg
- Parameters
-
comp_arg character string to be processed comp_type extracted component type name comp_prop extracted component's properties
◆ procContextArgs()
|
protected |
Extracting ExecutionContext's name/properties from the given string.
This operation extracts ExecutionContext's name and its properties from the figen character string. The given string formats is the following.
[ExecutionContext's name]?[key(0)]=[val(0)]&[key(1)]=[val(1)]...[key(n)]=[val(n)]
"ec_conf" is returned as Properties type object includeing component properties to be given to component.
- Returns
- ec_arg false will returned if no ExecutionContext's name in arg
- Parameters
-
ec_arg character string to be processed ec_type extracted ExecutionContext's name ec_prop extracted ExecutionContext's properties
◆ publishPorts()
|
protected |
- Parameters
-
comp
◆ registerComponent()
| bool RTC::Manager::registerComponent | ( | RTObject_impl * | comp | ) |
Register RT-Component directly without Factory.
Register specified RT-Component's instances not via Factory to Manager directly.
- Parameters
-
comp Target RT-Component's instances for the registration
- Returns
- Registration result (Successful:true, Failed:false)
◆ registerECFactory()
| bool RTC::Manager::registerECFactory | ( | const char * | name, |
| ECNewFunc | new_func, | ||
| ECDeleteFunc | delete_func ) |
Register ExecutionContext Factory.
Register Factory to create ExecutionContext's instances.
- Parameters
-
name ExecutionContext name for the creation new_func ExecutionContext creation function delete_func ExecutionContext destruction function
- Returns
- Registration result (Successful:true, Failed:false)
◆ registerFactory()
| bool RTC::Manager::registerFactory | ( | coil::Properties & | profile, |
| RtcNewFunc | new_func, | ||
| RtcDeleteFunc | delete_func ) |
Register RT-Component Factory.
Register Factory to create RT-Component's instances.
- Parameters
-
profile RT-Component profile new_func RT-Component creation function delete_func RT-Component destruction function
- Returns
- Registration result (Successful:true, Failed:false)
◆ removeLocalServiceActionListener()
| void RTC::Manager::removeLocalServiceActionListener | ( | RTM::LocalServiceActionListener * | listener | ) |
◆ removeManagerActionListener()
| void RTC::Manager::removeManagerActionListener | ( | RTM::ManagerActionListener * | listener | ) |
◆ removeModuleActionListener()
| void RTC::Manager::removeModuleActionListener | ( | RTM::ModuleActionListener * | listener | ) |
◆ removeNamingActionListener()
| void RTC::Manager::removeNamingActionListener | ( | RTM::NamingActionListener * | listener | ) |
◆ removeRtcLifecycleActionListener()
| void RTC::Manager::removeRtcLifecycleActionListener | ( | RTM::RtcLifecycleActionListener * | listener | ) |
◆ removeTask()
|
inlinestatic |
Remove the task from the Manager timer.
This operation remove the specify function.
- Parameters
-
id Task ID
◆ runManager()
| void RTC::Manager::runManager | ( | bool | no_block = false | ) |
Run the Manager.
This operation processes the main event loop of the Manager. In this main loop, periodic task and etc. are performed. This operation also start CORBA's ORB event loop. As the default behavior, this operation is going to blocking mode and never returns until Manager::terminate() is called. When the given argument "no_block" is set to "true", this operation creates a thread to process the event loop internally, and it doesn't block and returns.
- Parameters
-
no_block false: Blocking mode, true: non-blocking mode.
◆ setEndpointProperty()
|
protected |
Setting endpoint info from corba.endpoints .
◆ setModuleInitProc()
| void RTC::Manager::setModuleInitProc | ( | ModuleInitProc | proc | ) |
Set initial procedure.
This operation sets the initial procedure call to process module initialization, other user defined initialization and so on. The given procedure will be called at the proper timing after the manager initialization, activation and run.
- Parameters
-
proc A function pointer to the initial procedure call
◆ shutdown()
|
protected |
Shutdown Manager.
Terminate manager's processing. After terminating ORB, shutdown manager in sync.
◆ shutdownComponents()
|
protected |
NamingManager finalization.
Get a list of RT-Components that have been registered to NamingManager, and shutdown all components.
◆ shutdownLogger()
|
protected |
◆ shutdownManagerServant()
|
protected |
Manager Servant finalization.
◆ shutdownNaming()
|
protected |
NamingManager finalization.
Finalize NamingManager. Unbind all registered elements and shutdown them.
◆ shutdownORB()
|
protected |
ORB finalization.
Finalize ORB . When the waiting process exists, wait until it completes. In actual finalization, deactivate POA Manager and then shutdown of ORB.
◆ subscribePorts()
|
protected |
- Parameters
-
comp
◆ terminate()
|
static |
Terminate manager.
Terminate manager's processing
◆ theORB()
| CORBA::ORB_ptr RTC::Manager::theORB | ( | ) |
Get the pointer to ORB (ownership retained)
Get the pointer to ORB that has been set to Manager. The ownership of ORB is retained. If the returned value is assigned to _var variable, getORB() operation must be used. This operation is provided for the following use.
Manager::instance().theORB()->string_to_object(<IOR string>);
- Returns
- ORB object
◆ thePOA()
| PortableServer::POA_ptr RTC::Manager::thePOA | ( | ) |
Get a pointer to RootPOA held by Manager.
Get the pointer to RootPOA that has been set to Manager. The ownership of POA is retained. If the returned value is assigned to _var variable, getPOA() operation must be used. This operation is provided for the following use.
Manager::instance().getPOA()->servant_to_id(m_servant);
- Returns
- RootPOA object
◆ thePOAManager()
| PortableServer::POAManager_ptr RTC::Manager::thePOAManager | ( | ) |
Get POAManager that Manager has (ownership retained)
Get POAMAnager that has been set to Manager. The ownership of POAManager is retained. If the returned value is assigned to _var variable, getPOAManager() operation must be used. This operation is provided for the following use.
Manager::instance().thePOAManager()->activate();
- Returns
- POA manager
◆ unload()
| void RTC::Manager::unload | ( | const char * | fname | ) |
Unload module.
Unload module.
- Parameters
-
fname The module file name
◆ unloadAll()
| void RTC::Manager::unloadAll | ( | ) |
Unload all modules.
Unload all modules.
◆ unregisterComponent()
| bool RTC::Manager::unregisterComponent | ( | RTObject_impl * | comp | ) |
Unregister RT-Components.
Unregister specified RT-Components
- Parameters
-
comp Target RT-Component's instances for the unregistration
- Returns
- Unregistration result (Successful:true, Failed:false)
Member Data Documentation
◆ m_argv
|
protected |
The argument of ORB_init .
◆ m_argvSize
|
protected |
The argument of ORB_init .
◆ m_compManager
|
protected |
ComponentManager .
◆ m_config
|
protected |
Managaer's configuration Properties .
Referenced by getConfig(), and getLogLevel().
◆ m_ecfactory
|
protected |
ExecutionContext Manager .
◆ m_ecs
|
protected |
ExecutionContext list .
◆ m_factory
|
protected |
ComponentManager .
◆ m_finalized
|
protected |
◆ m_initProc
|
protected |
User's initialization function's pointer .
◆ m_invoker
|
protected |
Timer Object for delay call on the Manager thread .
◆ m_isRunning
|
staticprotected |
A flag to stop the main thread. .
◆ m_listeners
|
protected |
◆ m_logfiles
|
protected |
Files for log output .
◆ m_logStreamBuf
|
protected |
Logger buffer .
Referenced by getLogStreamBuf().
◆ m_mgrservant
|
protected |
The pointer to the ManagerServant .
◆ m_module
|
protected |
The pointer to the ModuleManager .
◆ m_namingManager
|
protected |
The pointer to the NamingManager .
◆ m_needsTimer
|
protected |
A flag that Manager use Timer or not. .
◆ m_pORB
|
protected |
The pointer to the ORB .
◆ m_pPOA
|
protected |
The pointer to the POA .
◆ m_pPOAManager
|
protected |
The pointer to the POAManager .
◆ m_scheduler
|
protected |
Timer Object for delay call on the Manager thread .
◆ m_signals
|
protected |
An array for signals management .
◆ m_threadMain
|
protected |
Manager main thread. .
◆ m_threadOrb
|
protected |
ORB thread. .
◆ manager
◆ mutex
|
staticprotected |
The mutex of the pointer to the Manager .
◆ rtclog
|
protected |
Logger stream .
The documentation for this class was generated from the following file:
Generated by