LRFからデータを取得するためのコンポーネントです.
修正BSDライセンスを適用しています.
3月上旬頃公開予定
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
対象物のテクスチャ等の特徴量を基に 物体認識を行い,認識結果に基づいてお菓子などの日用品の多品種個別識別とそのハンドリングを実現するコンポーネント群です. 和菓子の店頭販売をイメージし,ユーザの発見,ユーザとインタラクション,和菓子の認識,和菓子のハンドリングを行うためのコンポーネントとサンプルを提供します.
カメラベース人物発見モジュール群 人発見コンポーネント
AGVによる部品運搬とHIROによる物体操作の実行順序を制御して 連携作業を行うモジュール 2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。 2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
国立大学法人 豊橋技術科学大学 行動知能システム学研究室 〒441-8580 豊橋市天伯町雲雀ヶ丘1-1 email: rtc@aisl.cs.tut.ac.jp
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。 具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して 双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。 システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を 行うための RTC 群で構成される。
双腕ロボットHiroNXに対してOpenRTM経由で動作コマンドを送るためのインタフェースを提供します。
HiroNXInterface使用説明書
LGPL ver.2.1
http://code.google.com/p/hironx-interface
アームの先端にハンドが取り付けられたロボットシステムに対して、把持計画、動作計画、作業計画などを行う、Choreonoidのプラグイン群です。
Choreonoid
graspPlugin for Choreonoid graspPlugin for Choreonoid インストール手順書 双腕ロボットデモ手順書
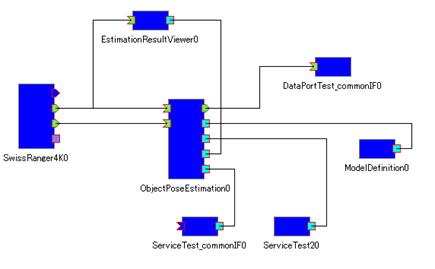
このコンポーネントはスイス MESA社製の3次元距離測定カメラ SwissRanger SR4000からのデータを基に机上の複数個の直方体物体と円筒物体の3次元空間上での位置と姿勢を推定するコンポーネントです。 2012年2月22日にコンポーネント本体とマニュアルを更新しました。
ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を共通形式で出力するモジュール群です。
オープンソース版作業対象認識モジュール群 座標系変換ツール「OpenVGRextra」 オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



データ取得コンポーネント(LRF)
概要
LRFからデータを取得するためのコンポーネントです.
ライセンス
修正BSDライセンスを適用しています.
開発バージョン
3月上旬頃公開予定
連絡先
奈良先端科学技術大学院大学 情報科学研究科
robotics-staff@is.naist.jp
〒630-0192 奈良県 生駒市 高山町 8916-5
Tel: 0743-72-5371, Fax: 0743-72-5379
謝辞
本システムは、新エネルギー・産業技術総合開発機構(NEDO)
次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として
開発されたことを記し、ここに感謝の意を表する。