

Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
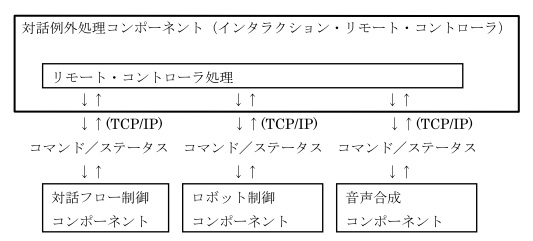
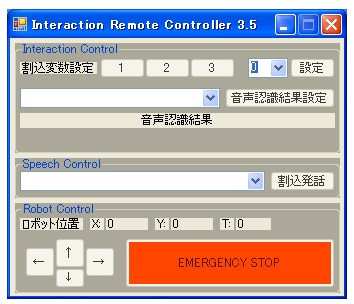
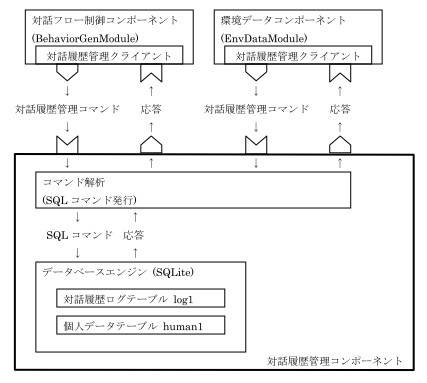
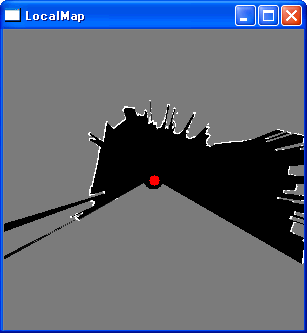
対人追従モジュール群
概要
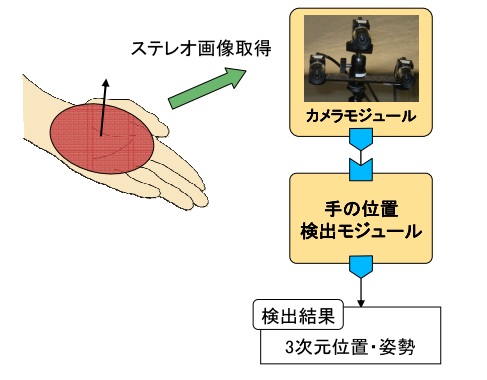
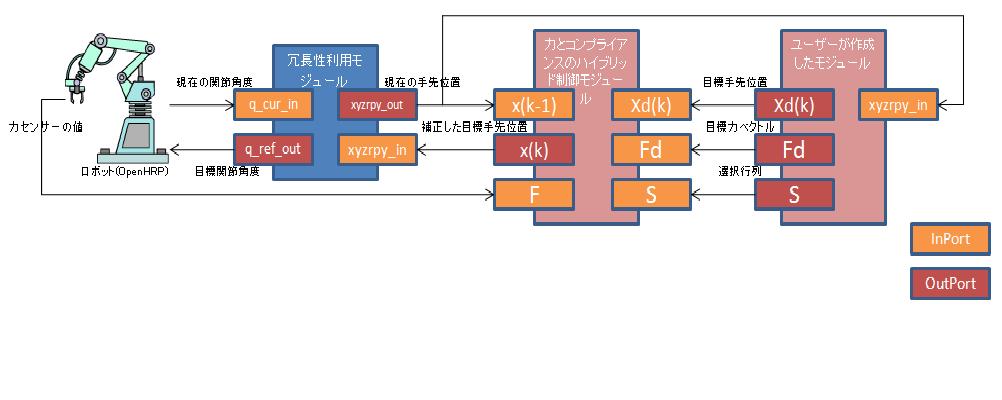
人発見モジュール(LRF),人発見モジュール(stereo camera) からの情報を統合し,移動ロボットに対しての速度,角速度指令を算出するコンポーネント群です。
使用法などについては,解凍後フォルダー内のHumanDetecFusion,
LocalPahPlanning各々のreadme.txtを参照ください。
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。