Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
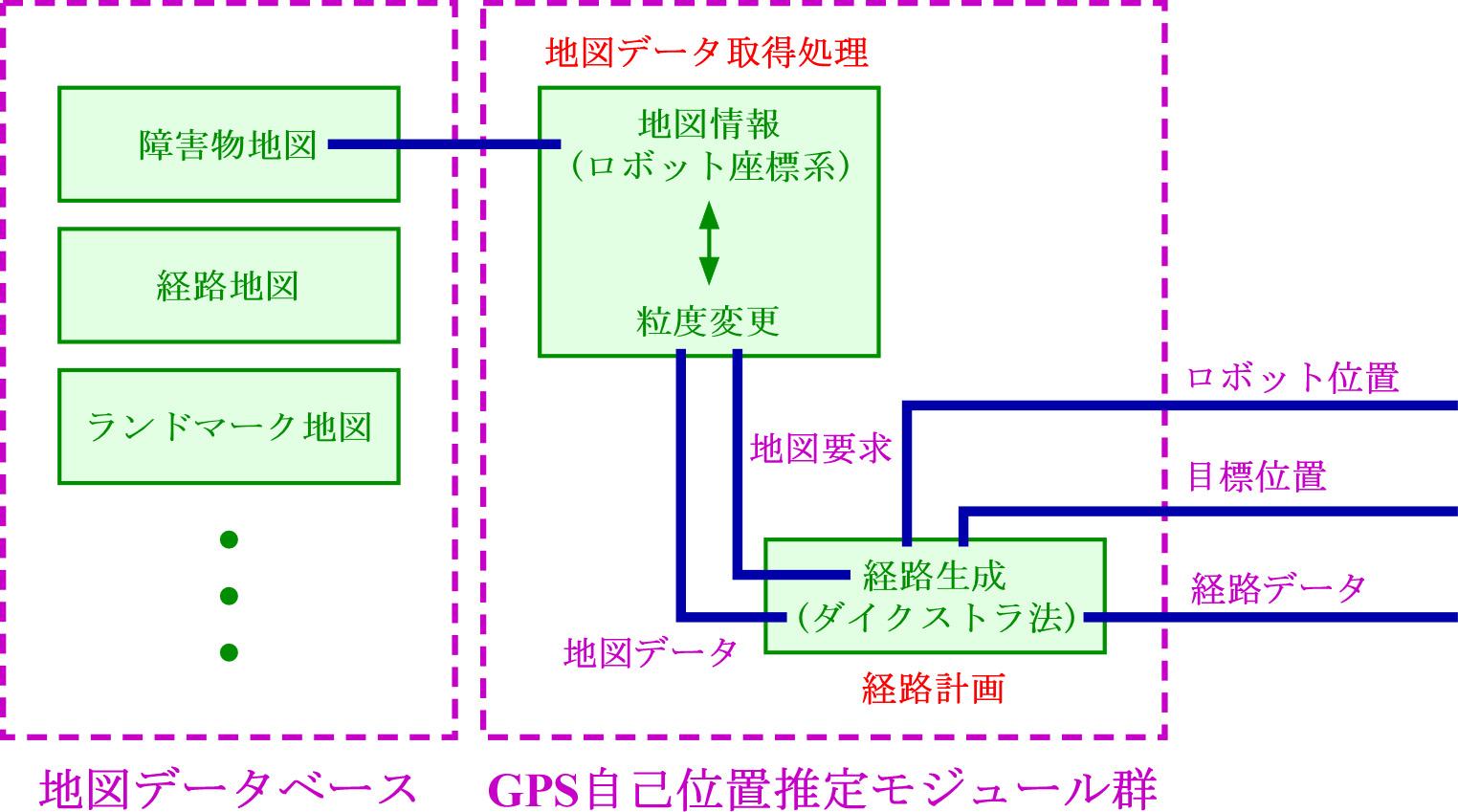
回避行動モジュール
概要)
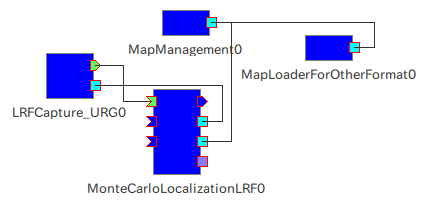
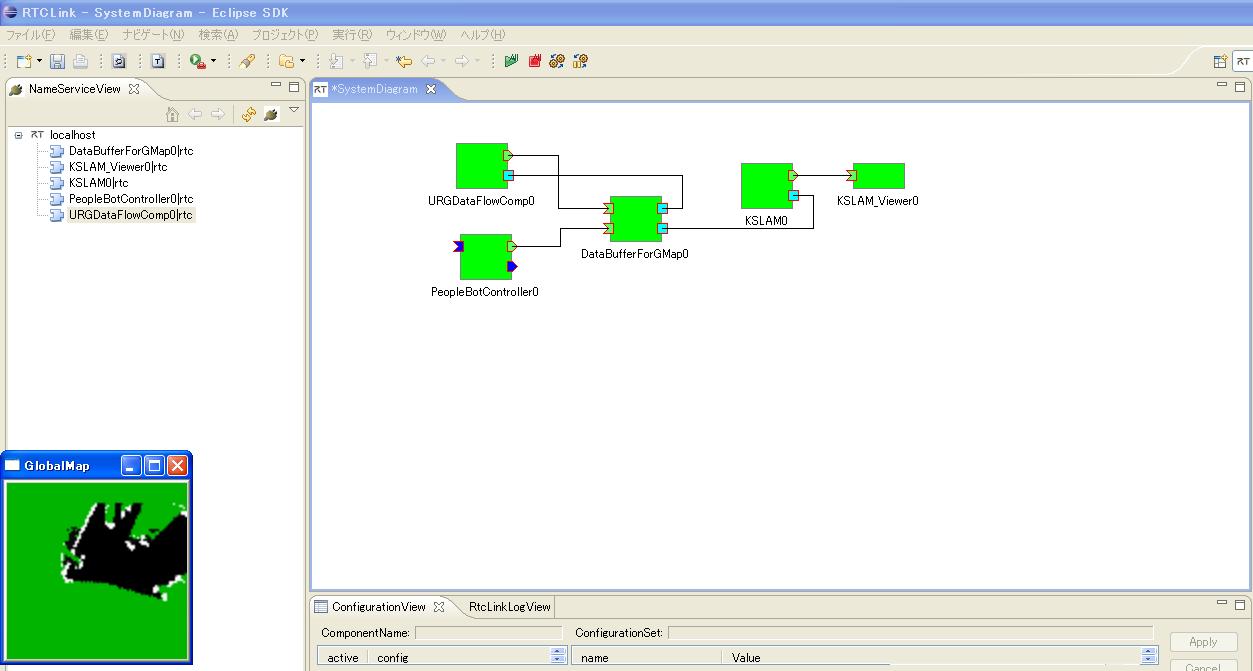
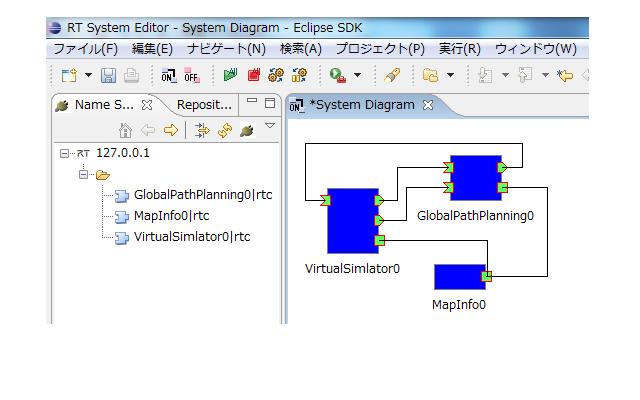
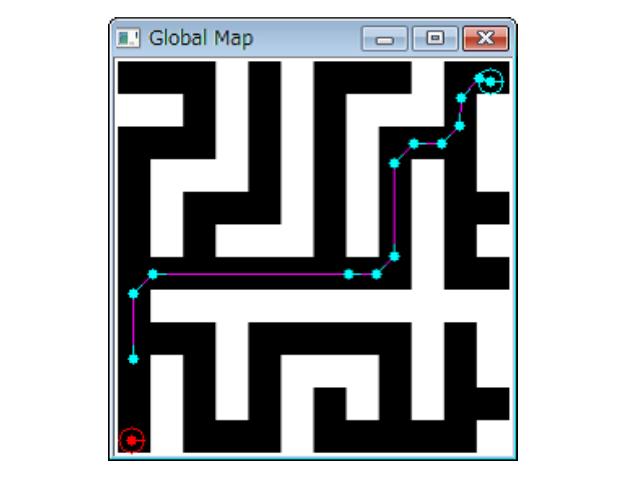
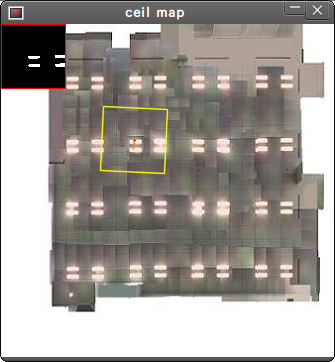
障害物情報を用いて障害物回避を行うシンプルなコンポーネント群です。
注意事項)
・測域センサ用障害物検知RTCの利用には人追従機能RTCモジュール群中のUrg Comp が必要です。
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
ライセンス)
BSDライセンス