Futaba製サーボモータRSシリーズ制御用RTC
Futaba製サーボモータRSシリーズ制御用RTC
概要
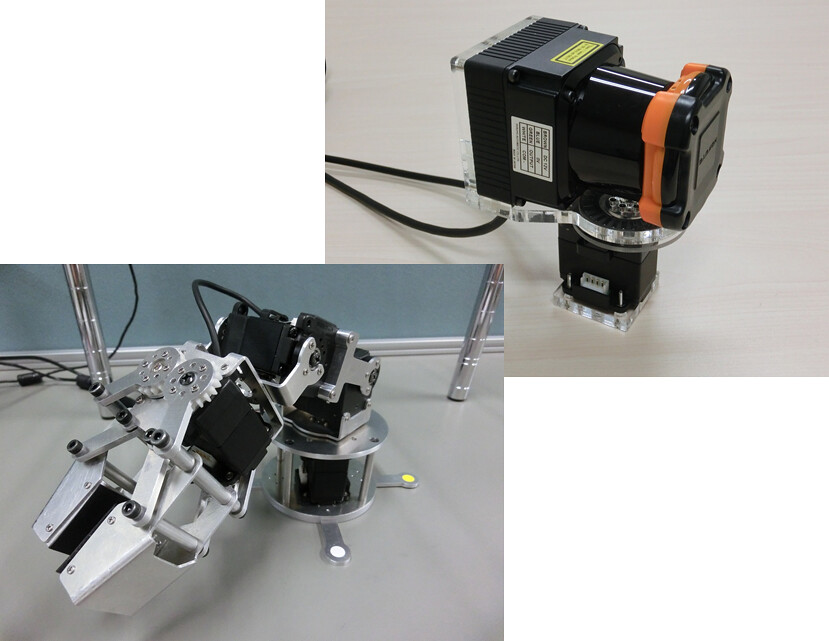
双葉電子工業(株)製のコマンド式サーボモータRSシリーズを制御するコンポーネントです適用事例としてアームコンポーネントと、レーザースキャナコンポーネントも配布しています
その他開発支援RTCや資料なども配布中です
特徴
- シンプルな入出力で再利用性に配慮
- Python Moduleをラップした階層構造によりユーザ自身が簡単に改変可能
- RPU10、RPU11(G-ROBOTS)にも対応
- 豊富な適用事例を掲載
再利用性に配慮したシンプルなポート構成にて製作しています
付属するpyrs.pyを通して制御を行なっているので、ユーザーの好みに合わせて機能を拡張を簡単に行えます
各コンポーネントの詳しい説明はコンポーネントのリンク先に記述してあります
名前をクリックするか、下のダウンロードから飛んでください
仕様
- 言語: Python
- OS:Ubuntu 10.04 LTS 32bit、Ubuntu 12.04LTS 32bit、Windows 7 32bit/64bit
- 外部依存Module:pySerial(2003-2010)
動画
・本ページにも掲載されているアームコンポーネントのサンプルシステムですアームロボットによるカラーボールのお片づけ
・サーボモータとURGを用いた3次元測距センサです
回転式3次元距離センサ SphereURG
・RsMotionを使ったサーボモータの操作例です
サーボモータ制御用GUI RsMotoin
発表資料
取り急ぎ発表資料をアップロードします
ビデオなどはYoutubeに公開していますので、そちらを御覧ください。
発表資料
Python Module群
- pyprs
PythonからRSシリーズのサーボモータの制御を行います
RsServoManagerを構成しているモジュールで、ユーザはこのモジュールを使用して自由にコンポーネントをカスタマイズできます
- pyurg
PythonからURGシリーズのセンサーの制御を行います
UrgManagerを構成しているモジュールで、ユーザはこのモジュールを使用して自由にコンポーネントをカスタマイズできます
コンポーネント群
RSシリーズのサーボモータを制御するコンポーネントです
UEGシリーズのセンサーと通信するコンポーネントです
- RsMotion(旧名:TkRsControl)
GUIを使用してサーボモータへ指令を送るコンポーネントです
動画はこちらから

3軸(+1軸グリッパ)のロボットアームの逆運動学を解くコンポーネントです
軸配置は変えられませんが、軸間などは自由に調節ができます

カラーボールを追跡して、カラーボールの座標を出力します
サンプルシステムとしてロボットアームのカラーボールお片づけを実装しています
追跡する色の設定は自由に行なえます
また、据え置きできない卓上の小型ロボットアームでスムーズに使えるよう、 十字円を使ったキャリブレーション方法を提案しています

2次元平面のレーザースキャナであるURGをサーボモータで移動さえることで、3次元測域センサを制作しています
センサ自体はレーザーカッターがあれば誰でも作れるようシンプルな構成にしてあります
このセンサは6つコンポーネント郡から構成されています
SphereURG、SphereURGContoroller、SphereURGCViewerの説明はSphereURGのページに記述しています
また、SphereURG_PackというフォルダにすべてのコンポーネントをセットにしてDLできるようにしてあります
SphereURGの加工データ(DXF)と組立方法を記した資料も配布しています
・RsServoManager
・UrgManager
・MultiTypeConsoleIn
・SphereURG
・SphereURGContoroller
・SphereURGViewer


任意の型のデータが入力でき、入力されたデータをCSVファイルに保存できる開発支援コンポーネントです


任意の型のデータをコンソールとCSVファイルから出力できる開発支援コンポーネントです

Download
配布物の使い方やライセンスは各ダウンロードページを御覧ください
現在Githubが使用不能になったので、SkydriveからDLできるように変更しました
全てのコンポーネントは下のダウンロードから入手できます
マニュアルは順次移しますが、現状ではGithubのREADME.mdをご覧ください
ダウンロード
- RsMotion:マニュアル
- ArmISIK:マニュアル
- ArmISColorBall:マニュアル
- SphereURG:マニュアル
- MultiTypeConsoleOut:マニュアル
- MultiTypeConsoleIn:マニュアル
付録
RT-MiddleWareをはじめよう Side-Windows:DL
OpenRTMのスタートアップガイドを付録として配布します
55ページに渡り初心者の方を対象としてマニュアルを書きました
ぜひこちらの付録を御覧ください

更新履歴
・01:51 19-12-2012RTMコンテストの発表資料を仮アップロードしました
・18:31 15-12-2012
配布予定のコンポーネントをすべてアップロードしました
・22:56 14-12-2012
RsServoMangaerとpyrsをG-ROBOTSなどに使われているRPU11、RPU10のコントローラを使用した通信に対応させました
・02:26 13-12-2012
GithubのDLページが使用不能になったため、Skydriveにバイナリファイルを移しました
・13:47 11-12-2012
付録:RT-MiddleWareをはじめようのセミナー資料を更新~ 誤字脱字修正とJDKのインストールで32bitが必要な場合を追記
・23:50 11-12-2012
ArmISIK, ArmISColorBallをアップロード
RsMotion, カラーボールのお片づけ動画をアップロード
コメント
デバイスが手元に無いので,マニュアル等を見ています.便利そうですね.
個々のマニュアルの完成度も高く,また付録のセミナー資料が素晴らしいと思います.
1点だけ. JREは32bitをインストールするように誘導した方が良かったと思います.JAVA版の対応がまだだったと思います. 現状の1.0RC1は分かりませんが・・・
残りのアームコンポーネントもUploadしましたのでご覧いただけますと幸いです
またセミナー資料のご指摘ありがとうございます
個人的にJava版を使用したことがなく失念しておりました
Java版のサイトを確認したところここに32bitをインストールする旨が記述されていました
そこで、セミナー資料の初めに、Java版を使用する場合はJDK6 32bitをインストールするよう追記しました
以上、よろしくお願いいたします
Futaba製サーボモータRSシリーズ制御用RTC
------------------------------------------------------------
サーボモータに関するRTCがまだ充実していないので、
このコンポーネントのように他社のサーボモータについてもコンポーネント化が進めば、
ハードウェア開発時に容易にサーボモータを導入することができると思います。
現在別件の発表で使用している、Pirkus製のサーボモータのコンポーネントは以下のページで配布されていますので、ぜひ御覧ください。 http://www.openrtm.org/openrtm/ja/node/5191
日本HPI社製のG-ROBOTSを制御する際にこのコンポーネントを利用しました.
特にRTM上で同時に多くのサーボモータを制御するのに重宝しました.
また,Ubuntu12.10 32bit環境でも動作を確認しましたので報告致します.
Futaba replique montre fait servomoteur Breitling commande série RS pour le RTC