Actuator device RTCs
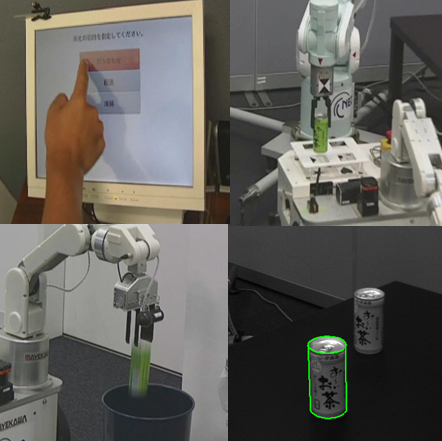
このプロジェクトは機能的に大きく2つに分かれています. 1つはOROCHIの手先に固定したKinectを使用してOROCHI正面に座っている人の顔を検出してOROCHIがその人の顔を追うように動きます. もう1つの機能は,Bluetoothモジュールを備えた車型ロボットの頭部にARマーカーを付け,その上方に設置されたもう一台のKinectを使用して車型のロボットの位置を検出し,ロボットの動きを制御するというものです. 最終的に,OROCHIで検出した顔の輪郭に沿うように車型ロボットが走行することを目標とします.
以下が作成・使用したコンポーネントです
括弧内の文字の説明
・既存:既存のRTCを使用 ・編集:既存のRTCを修正 ・新規:新規に作成したRTC
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの とする。 このシステムで行われるサービス内容は、表「サービス一覧」に示すサービス に分割されており各サービス毎、及びサービス連動での動作を可能とする。
【サービス 一覧】
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

RTミドルウェア学習用ロボットアーム制御RTコンポーネント群
概要・特徴