|
OpenRTM-aist
1.2.1
|
InPortPushConnector class. More...
#include <InPortPushConnector.h>
Public Member Functions | |
| DATAPORTSTATUS_ENUM | InPortPushConnector (ConnectorInfo info, InPortProvider *provider, ConnectorListeners &listeners, CdrBufferBase *buffer=0) |
| virtual | ~InPortPushConnector () |
| Destructor. More... | |
| virtual ReturnCode | read (cdrMemoryStream &data) |
| Reading data. More... | |
| virtual ReturnCode | disconnect () |
| disconnect More... | |
| virtual void | activate () |
| Connector activation. More... | |
| virtual void | deactivate () |
| Connector deactivation. More... | |
 Public Member Functions inherited from RTC::InPortConnector Public Member Functions inherited from RTC::InPortConnector | |
| DATAPORTSTATUS_ENUM | InPortConnector (ConnectorInfo &info, ConnectorListeners &listeners, CdrBufferBase *buffer) |
| Constructor. More... | |
| virtual | ~InPortConnector () |
| Destructor. More... | |
| virtual const ConnectorInfo & | profile () |
| Getting ConnectorInfo. More... | |
| virtual const char * | id () |
| Getting Connector ID. More... | |
| virtual const char * | name () |
| Getting Connector name. More... | |
| virtual CdrBufferBase * | getBuffer () |
| Getting Buffer. More... | |
| virtual void | setEndian (const bool endian_type) |
| Setting an endian type. More... | |
| virtual bool | isLittleEndian () |
| Whether this connector's endian is little. More... | |
| bool | setOutPort (OutPortBase *directOutPort) |
| template<typename DataType > | |
| bool | getDirectData (DataType &data) |
| Public Member Functions inherited from RTC::ConnectorBase | |
| virtual | ~ConnectorBase () |
| Destructor. More... | |
Protected Member Functions | |
| virtual CdrBufferBase * | createBuffer (ConnectorInfo &info) |
| create buffer More... | |
| void | onConnect () |
| Invoke callback when connection is established. More... | |
| void | onDisconnect () |
| Invoke callback when connection is destroied. More... | |
| void | onBufferRead (cdrMemoryStream &data) |
| void | onBufferEmpty (cdrMemoryStream &data) |
| void | onBufferReadTimeout (cdrMemoryStream &data) |
Additional Inherited Members | |
| Public Types inherited from RTC::DataPortStatus | |
| enum | Enum { PORT_OK = 0, PORT_ERROR, BUFFER_ERROR, BUFFER_FULL, BUFFER_EMPTY, BUFFER_TIMEOUT, SEND_FULL, SEND_TIMEOUT, RECV_EMPTY, RECV_TIMEOUT, INVALID_ARGS, PRECONDITION_NOT_MET, CONNECTION_LOST, UNKNOWN_ERROR } |
| DataPortStatus return codes. More... | |
| Static Public Member Functions inherited from RTC::DataPortStatus | |
| static const char * | toString (DataPortStatus::Enum status) |
| Convert DataPortStatus into the string. More... | |
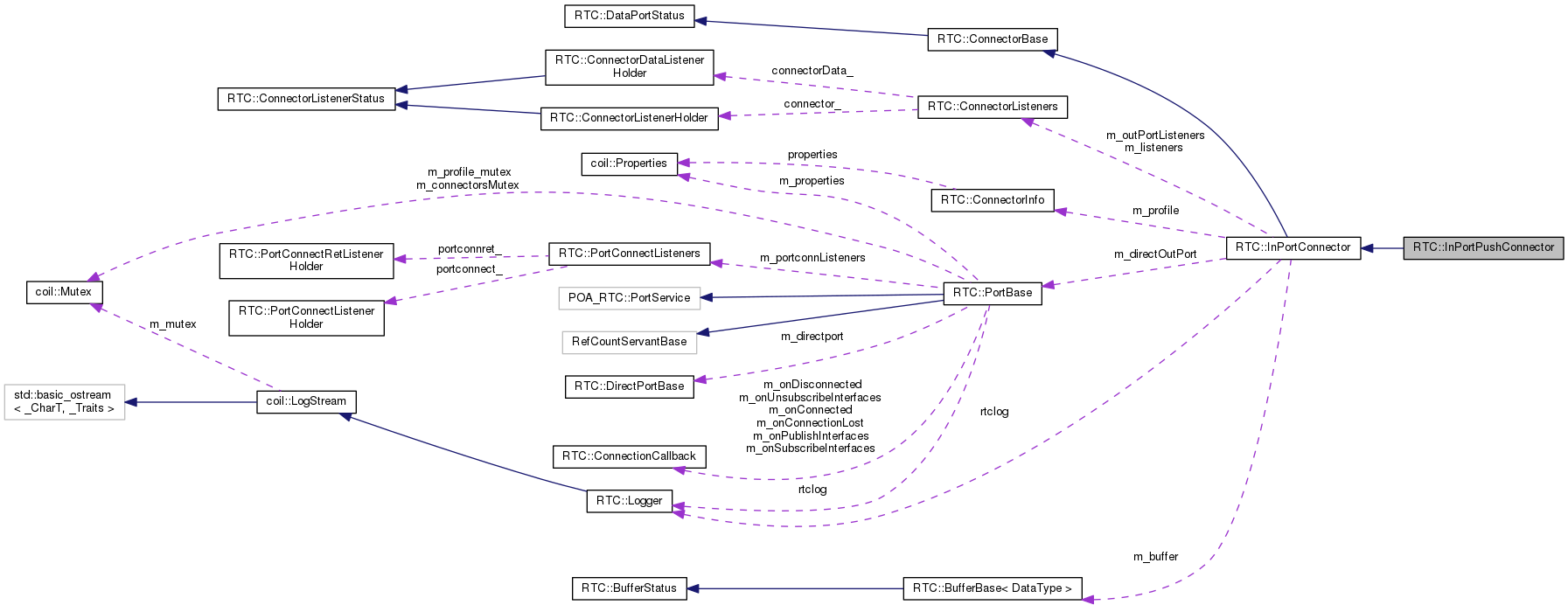
| Protected Attributes inherited from RTC::InPortConnector | |
| Logger | rtclog |
| Logger stream. More... | |
| ConnectorInfo | m_profile |
| ConnectorInfo. More... | |
| ConnectorListeners & | m_listeners |
| A reference to a ConnectorListener. More... | |
| CdrBufferBase * | m_buffer |
| Connector's buffer. More... | |
| bool | m_littleEndian |
| Connected Endian. More... | |
| ConnectorListeners * | m_outPortListeners |
| A pointer to a OutPort's ConnectorListener. More... | |
| PortBase * | m_directOutPort |
| OutProt pointer to the peer in the same process. More... | |
InPortPushConnector class.
Connector class of InPort for push type dataflow. When "push" is specified as dataflow_type at the time of establishing connection, this object is generated and owned by the InPort. This connector and OutPortPushConnector make a pair and realize push type dataflow of data ports. One connector corresponds to one connection which provides a data stream. Connector is distinguished by ID of the UUID that is generated at establishing connection.
InPortPushConnector owns and manages the following objects.
Data written into the OutPort are passed to the InPortProvider::put() by OutPortConnector. The data is written into the buffer in the connector.
| DATAPORTSTATUS_ENUM RTC::InPortPushConnector::InPortPushConnector | ( | ConnectorInfo | info, |
| InPortProvider * | provider, | ||
| ConnectorListeners & | listeners, | ||
| CdrBufferBase * | buffer = 0 |
||
| ) |
|
virtual |
Destructor.
This operation calls disconnect(), which destructs and deletes the consumer, the publisher and the buffer.
|
inlinevirtual |
|
protectedvirtual |
create buffer
This function creates a buffer based on given information.
| info | Connector information |
Referenced by deactivate().
|
inlinevirtual |
Connector deactivation.
This operation deactivates this connector
Implements RTC::ConnectorBase.
References createBuffer(), onConnect(), and onDisconnect().
|
virtual |
disconnect
This operation destruct and delete the consumer, the publisher and the buffer.
Implements RTC::InPortConnector.
|
inlineprotected |
References RTC::InPortConnector::m_profile, and RTC::ON_BUFFER_EMPTY.
|
inlineprotected |
References RTC::InPortConnector::m_profile, and RTC::ON_BUFFER_READ.
|
inlineprotected |
References RTC::InPortConnector::m_profile, and RTC::ON_BUFFER_READ_TIMEOUT.
|
protected |
Invoke callback when connection is established.
Referenced by deactivate().
|
protected |
Invoke callback when connection is destroied.
Referenced by deactivate().
|
virtual |
Reading data.
This function reads data from the buffer. If data is read properly, this function will return PORT_OK return code. Except normal return, BUFFER_EMPTY, TIMEOUT, PRECONDITION_NOT_MET and PORT_ERROR will be returned as error codes.
Implements RTC::InPortConnector.
 1.8.11
1.8.11

