|
OpenRTM-aist
1.2.1
|
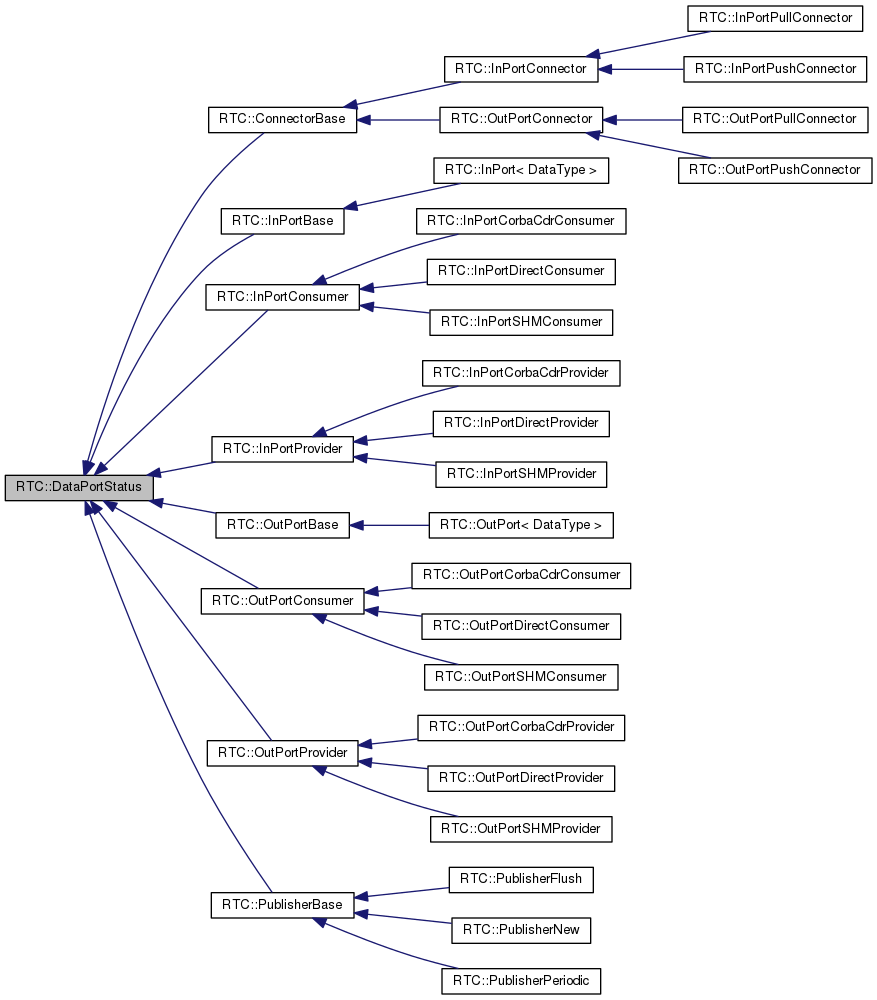
DataPortStatus mixin class. More...
#include <DataPortStatus.h>
Public Types | |
| enum | Enum { PORT_OK = 0, PORT_ERROR, BUFFER_ERROR, BUFFER_FULL, BUFFER_EMPTY, BUFFER_TIMEOUT, SEND_FULL, SEND_TIMEOUT, RECV_EMPTY, RECV_TIMEOUT, INVALID_ARGS, PRECONDITION_NOT_MET, CONNECTION_LOST, UNKNOWN_ERROR } |
| DataPortStatus return codes. More... | |
Static Public Member Functions | |
| static const char * | toString (DataPortStatus::Enum status) |
| Convert DataPortStatus into the string. More... | |
DataPortStatus mixin class.
This is a mixin class to provide enumed return codes that are commonly utilised in connector listener related sub-classes. To use this class, sub-class should inherit this class as a public super class, and declare CONNLISTENERSTATUS_ENUM defined below. Consequently, ReturnCode type that is typedefed by this macro can be used in the sub-class, and enumed identifiers are imported to the class's namespace.
This is a mixin class to provide enumed return codes that are commonly utilised in data port related sub-classes. To use this class, sub-class should inherit this class as a public super class, and declare DATAPORTSTATUS_ENUM defined below. Consequently, ReturnCode_t type that is typedefed by this macro can be used in the sub-class, and enumed identifiers are imported to the class's namespace.
DataPortStatus return codes.
Common return codes for data ports related classes.
This error codes might be used to propagate error status from the error occurring point to the function caller in the data stream path. It would occur in data-transfer path and data receiver/sender. The errors that occur in the interface of each portion of data port are shown below.
(1) Push Type a) The return codes between InPortConsumer and Publisher/Activity PORT_OK, PORT_ERROR, SEND_FULL, SEND_TIMEOUT, CONNECTION_LOST, UNKNOWN_ERROR b) The return codes between Activity and Buffer/Connector of OutPort PORT_OK, PORT_ERROR, BUFFER_ERROR, BUFFER_FULL, BUFFER_TIMEOUT, UNKNOWN_ERROR,
(2) Pull Type a) The return codes between Activity and InPort PORT_OK, PORT_ERROR, RECV_EMPTY, RECV_TIMEOUT, CONNETION_LOST, UNKNOWN_ERROR
See function references for detailed return codes for each function.
| Enumerator | |
|---|---|
| PORT_OK | |
| PORT_ERROR | |
| BUFFER_ERROR | |
| BUFFER_FULL | |
| BUFFER_EMPTY | |
| BUFFER_TIMEOUT | |
| SEND_FULL | |
| SEND_TIMEOUT | |
| RECV_EMPTY | |
| RECV_TIMEOUT | |
| INVALID_ARGS | |
| PRECONDITION_NOT_MET | |
| CONNECTION_LOST | |
| UNKNOWN_ERROR | |
|
inlinestatic |
Convert DataPortStatus into the string.
Convert DataPortStatus into the string.
| status | The target DataPortStatus for transformation |
 1.8.11
1.8.11

