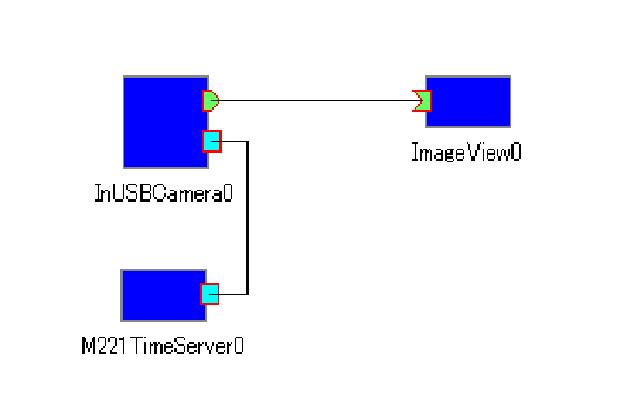
視覚入力コンポーネントは、USBカメラより画像を取得し、取得時間情報を付加して出力します。
下記ライブラリを使用しています。 ●DirectX SDK August 2007 ●Windows SDK Ver.6.0 ●OpenCV2.1(テストコンポーネントにて使用)
修正BSDライセンスを適用しています。
株式会社イーガー 新規事業開発部 kubota@mail.eager.co.jp 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel: 06-6360-2050, Fax: 06-6360-2051
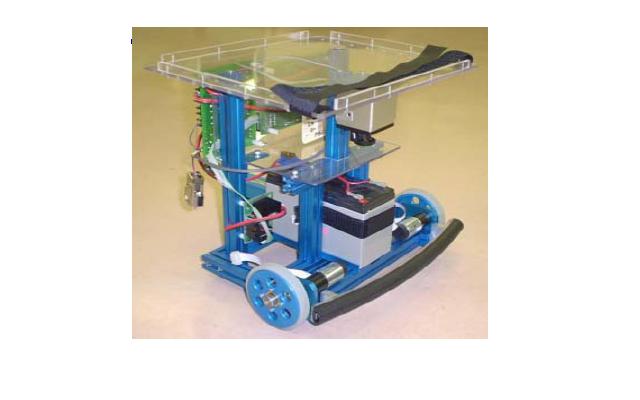
センサやアクチュエータをRTCとしてモジュール化し,それらを組み合わせ方や,統合するモジュールのプログラムを学習する教材を開発した.ロボットアームは,ROBOTIS社のアクチュエータDynamixelで構成されたものを想定している.また,センサは,深度カメラと触覚センサを想定している.Dynamixel汎用のRTCと深度カメラから3次元点群データを出力するRTCは,著者らの研究室がGitHubで公開しているものを再利用する.触覚センサとしてFingerVisionを導入し,そのためのRTCを新たに開発した.また,初学者でもセンサやアームの入出力を使いやすくなるように中継役のRTCを用意した.
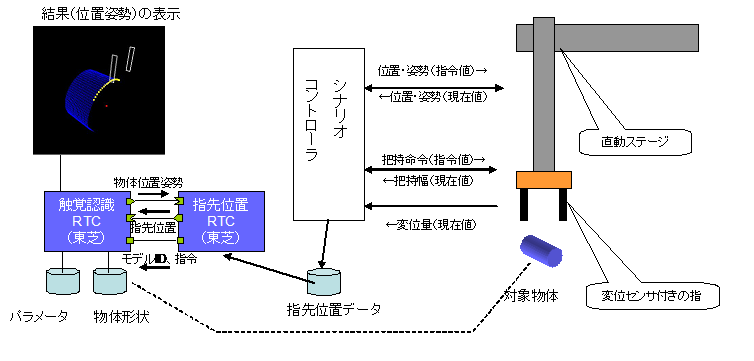
触覚認識モジュールは、変位センサを装備したロボットハンドで 物体(スプーン、缶など)の部分的な形状を測定し、予め登録した 形状データと照合し、その物体の重心位置・姿勢を算出するもの である。
バイナリー提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
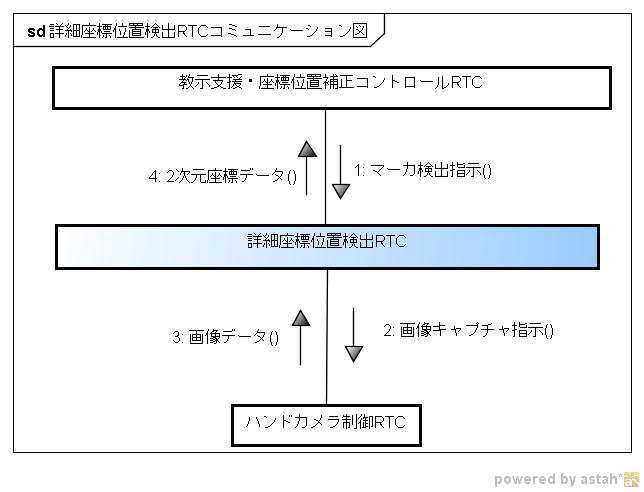
このコンポーネントは、画像ファイルを読み込んで、画像データ上の教示用の補助マーク1点を検出して、ロボット座標系におけるマーカの2次元座標で算出する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
共通カメラIFに準拠した認識情報管理コンポーネントです.
修正BSDライセンスを適用しています.
リンク先参照
国立大学法人 大阪大学 大学院基礎工学研究科 k-oohara@arai-lab.sys.es.osaka-u.ac.jp 〒560-8531 大阪府豊中市待兼山町1-3 Tel: 06-6850-6368, Fax: 06-6850-6341
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
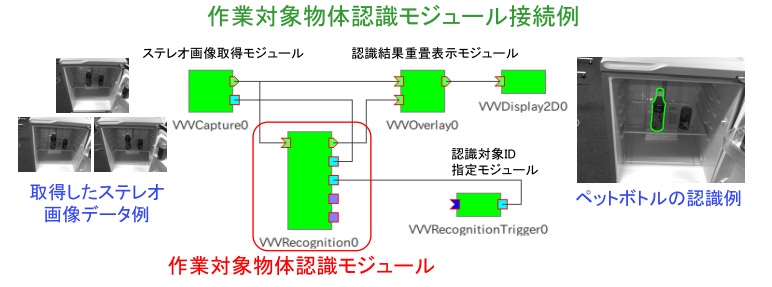
産業技術総合研究所が開発している3次元物体の認識機能を応用し 指定された対象物体の位置・姿勢を共通形式で出力するモジュール群です。
関連モジュール 作業対象物認識モジュール群 ステレオ画像取得RTC 画像データの表示RTC
利用に際しては高機能3次元視覚システムVVVのキャリブレーションデータが必要になります。 詳細に関しましては下記へお問い合わせ下さい。
本プログラムは指定されたゴール地点に向かって、ロボットのオドメトリー情報を 基に速度・角速度を制御するコンポーネントです。 Inputポートにゴール地点の情報とロボットのオドメトリー情報を入力します。 Outputポートからはゴール地点の情報とオドメトリー情報から算出された速度指令を 出力します。ゴール地点の情報については、ポートからの入力ではなくプログラム内で 直接指定することも出来ます。 入出力の型は自己定義のTimedVelocity,TimedOdometryなどを使用しています。 ご利用の際はご注意ください。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
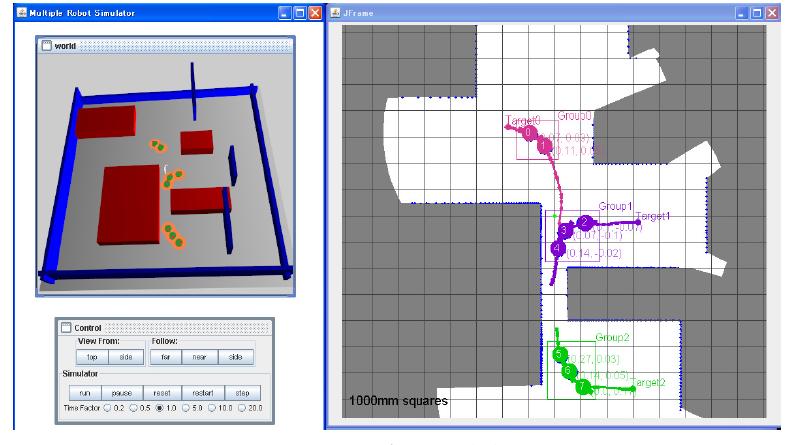
複数台ロボットシミュレータモジュール(オープンソース)
概要
本知能モジュールは,複数台移動ロボットのシミュレーションを行うことができるモジュールです。シミュレータには,Simbad というフリーシミュ
レータを利用しており,本モジュールにその機能が組み込まれています。
注意事項
下記ライブラリを使用しています。●Java3Dライブラリ
http://java.sun.com/javase/technologies/desktop/java3d/index.jsp
●Simbadシミュレータ
http://sourceforge.net/projects/simbad/files/
ライセンス