下記ライブラリを使用しています。 ●OpenCV 2.1.0
InPortから入力された画像から顔を検出し、入力画像に検出結果を描画した画像をOutPortから出力するとともに、別のOutPortでは、顔の位置や検出した顔の数を出力するコンポーネントです。
ここでは、OpenCVの機能を用いて顔検出を行うRTコンポーネントを紹介します。
利用者が本サイトからダウンロードしたファイルを利用することにより生じたいかなる不具合、故障、損害についても一切責任を負いません。
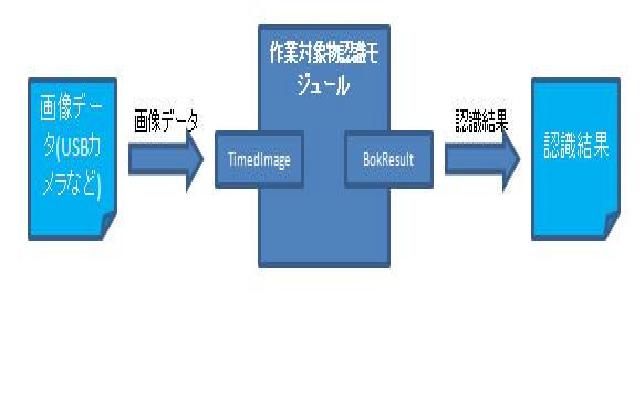
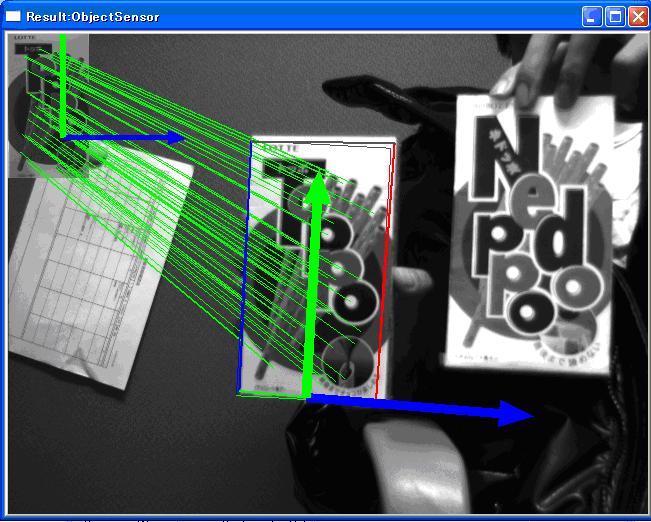
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、 作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
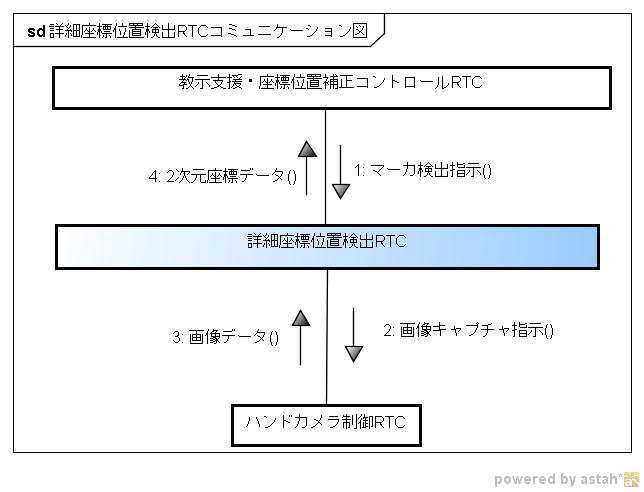
このコンポーネントは、画像ファイルを読み込んで、画像データ上の教示用の補助マーク1点を検出して、ロボット座標系におけるマーカの2次元座標で算出する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
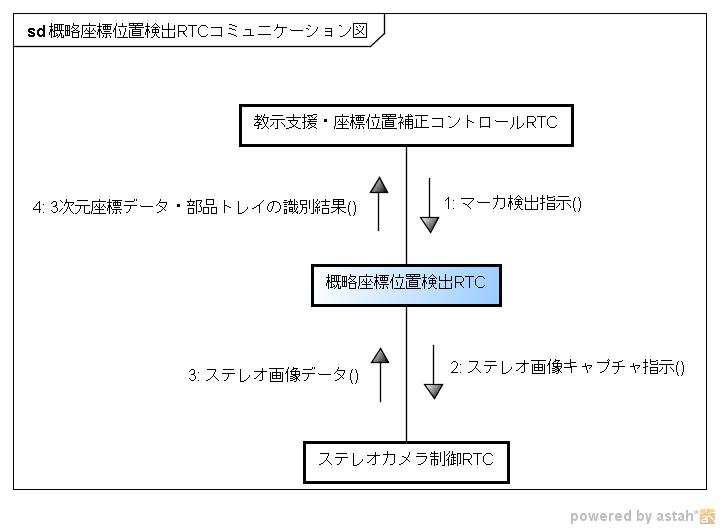
このコンポーネントは、ステレオ画像上より、マーカの座標を検出してマーカ配置パターンを識別する。
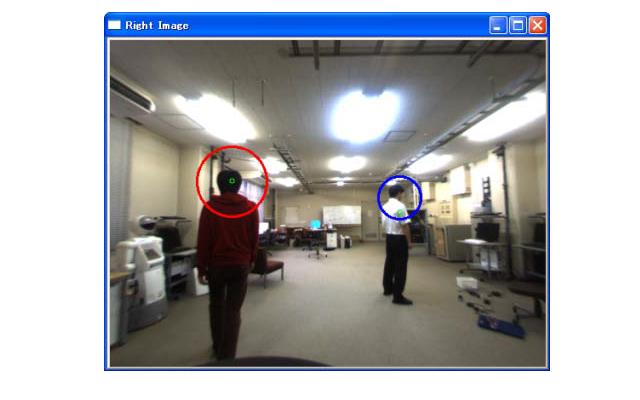
このコンポーネントはステレオカメラ(Bumblebee 2)の情報から人物を 検出し,それぞれの人物の位置と移動速度を出力するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●FlyCapture (配布元:http://www.ptgrey.com/) ●Triclops(配布元:http://www.ptgrey.com/))
修正BSDライセンスを適用しています。
ステレオカメラを利用し、指定された作業対象物の検出結果(3次元位置・姿勢)を共通形式で出力するモジュール群です。
オープンソース版作業対象認識モジュール群 座標系変換ツール「OpenVGRextra」 オープンソース版作業対象認識モジュール群に付加して使用するツールです。 認識結果の座標系を変換するために利用します。
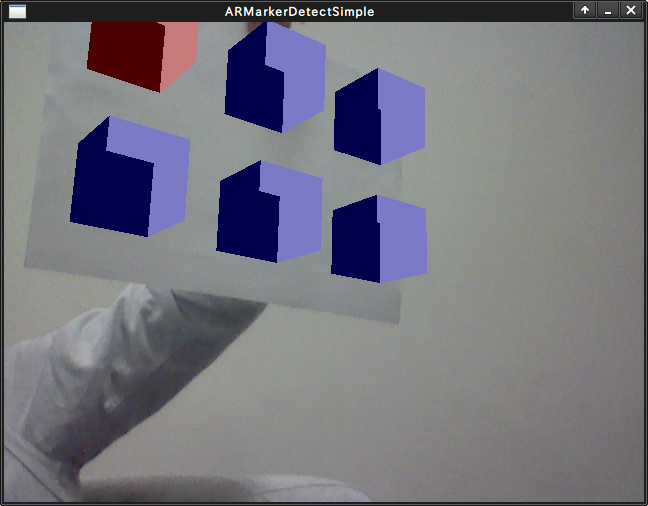
ARTool Kitを利用し、マーカの検出・位置姿勢推定を行うRTC。
下記ライブラリを使用しています。 ●ARTool Kit 2.72.1, OpenGL, GLUT, GLEW, OpenCV 2.0.0
ARTool Kitマーカ検出・位置姿勢推定モジュール 本モジュールのライセンスは、ARTool Kit のライセンス(GPL)に従います。 本モジュールの改変・再配布等については、GPL に従って行ってください。
画像キャプチャコンポーネント 商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
外界センサの情報から障害物情報を生成するコンポーネントです。
- Urg_to_obstacles 測域センサ用障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


顔認識モジュール
概要
本モジュールセットは、入力された画像から顔を検出し、検出された人物が事前に登録された人物の内の誰であるかを出力するコンポーネントです。
FaceLearningモジュールとFaceRecogモジュールにより構成されます。
・FaceLearningモジュールは、顔認識で用いる各人物の辞書と特徴抽出を
行うための直交変換行列を生成するプログラムです。
・FaceRecogモジュールは、FaceLearningで生成された辞書と変換行列を
用いて個人認識を行います。
認識にはKOMSM(Kernel Orthogonal Mutual Subspace Method)を利用しています。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.1.0