Public Member Functions | |
| __init__ (self, info, consumer, listeners, buffer=None) | |
| __del__ (self) | |
| write (self, data) | |
| disconnect (self) | |
| activate (self) | |
| deactivate (self) | |
| getBuffer (self) | |
| createPublisher (self, info) | |
| createBuffer (self, info) | |
| onConnect (self) | |
| onDisconnect (self) | |
| setInPort (self, directInPort) | |
| unsubscribeInterface (self, prop) | |
 Public Member Functions inherited from OpenRTM_aist.OutPortConnector.OutPortConnector Public Member Functions inherited from OpenRTM_aist.OutPortConnector.OutPortConnector | |
| profile (self) | |
| id (self) | |
| name (self) | |
| setDirectMode (self) | |
| directMode (self) | |
| setConsumer (self, consumer) | |
| Public Member Functions inherited from OpenRTM_aist.DataPortStatus.DataPortStatus | |
| toString (status) | |
Additional Inherited Members | |
| Static Public Attributes inherited from OpenRTM_aist.DataPortStatus.DataPortStatus | |
| int | PORT_OK = 0 |
Detailed Description
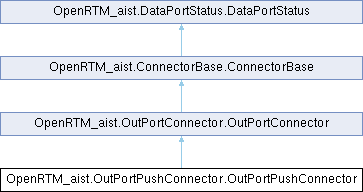
OutPortPushConnector class
Connector class of OutPort for push type dataflow. When "push" is specified as dataflow_type at the time of establishing connection, this object is generated and owned by the OutPort. This connector and InPortPushConnector make a pair and realize push type dataflow of data ports. One connector corresponds to one connection which provides a data stream. Connector is distinguished by ID of the UUID that is generated at establishing connection.
OutPortPushConnector owns and manages the following objects.
- InPortConsumer
- Buffer
- Publisher
- Since
- 1.0.0
Data written into the OutPort is passed to OutPortPushConnector.write(), and the connector writes into the publisher. The publisher gets data from the buffer based on the policy and it is transferred to InPort by pushing it into the InPortConsumer.
Constructor & Destructor Documentation
◆ __init__()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.__init__ | ( | self, | |
| info, | |||
| consumer, | |||
| listeners, | |||
| buffer = None ) |
Constructor
OutPortPushConnector's constructor is given the following arguments. According to ConnectorInfo which includes connection information, a publisher and a buffer are created. It is also given a pointer to the consumer object for the InPort interface. The owner-ship of the pointer is owned by this OutPortPushConnector, it has responsibility to destruct the InPortConsumer. OutPortPushConnector also has ConnectorListeners to provide event callback mechanisms, and they would be called at the proper timing. If data buffer is given by OutPortBase, the pointer to the buffer is also given as arguments.
- Parameters
-
info ConnectorInfo consumer InPortConsumer listeners ConnectorListeners type lsitener object list buffer CdrBufferBase type buffer
OutPortPushConnector(ConnectorInfo info, InPortConsumer* consumer, ConnectorListeners& listeners, CdrBufferBase* buffer = 0);
Reimplemented from OpenRTM_aist.OutPortConnector.OutPortConnector.
◆ __del__()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.__del__ | ( | self | ) |
Destructor
Reimplemented from OpenRTM_aist.OutPortConnector.OutPortConnector.
Member Function Documentation
◆ activate()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.activate | ( | self | ) |
Connector activation
This operation activates this connector
virtual void activate();
Reimplemented from OpenRTM_aist.ConnectorBase.ConnectorBase.
◆ createBuffer()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.createBuffer | ( | self, | |
| info ) |
create buffer
This function creates a buffer based on given information.
- Parameters
-
info Connector information
- Returns
- The poitner to the buffer
virtual CdrBufferBase* createBuffer(ConnectorInfo& info);
◆ createPublisher()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.createPublisher | ( | self, | |
| info ) |
create buffer
This function creates a publisher based on given information.
- Parameters
-
info Connector information
- Returns
- The poitner to the publisher
virtual PublisherBase* createPublisher(ConnectorInfo& info);
◆ deactivate()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.deactivate | ( | self | ) |
Connector deactivation
This operation deactivates this connector
virtual void deactivate();
Reimplemented from OpenRTM_aist.ConnectorBase.ConnectorBase.
◆ disconnect()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.disconnect | ( | self | ) |
disconnect
This operation destruct and delete the consumer, the publisher and the buffer.
virtual ReturnCode disconnect();
Reimplemented from OpenRTM_aist.ConnectorBase.ConnectorBase.
◆ getBuffer()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.getBuffer | ( | self | ) |
Getting Buffer
This operation returns this connector's buffer
virtual CdrBufferBase* getBuffer();
Reimplemented from OpenRTM_aist.ConnectorBase.ConnectorBase.
◆ onConnect()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.onConnect | ( | self | ) |
Invoke callback when connection is established void onConnect()
◆ onDisconnect()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.onDisconnect | ( | self | ) |
Invoke callback when connection is destroied void onDisconnect()
◆ setInPort()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.setInPort | ( | self, | |
| directInPort ) |
- Parameters
-
self directInPort
- Returns
bool setInPort(InPortBase* directInPort);
◆ unsubscribeInterface()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.unsubscribeInterface | ( | self, | |
| prop ) |
- Parameters
-
prop
Reimplemented from OpenRTM_aist.OutPortConnector.OutPortConnector.
◆ write()
| OpenRTM_aist.OutPortPushConnector.OutPortPushConnector.write | ( | self, | |
| data ) |
Writing data
This operation writes data into publisher and then the data will be transferred to correspondent InPort. If data is written properly, this function will return PORT_OK return code. Except normal return, CONNECTION_LOST, BUFFER_FULL, BUFFER_ERROR, PORT_ERROR, BUFFER_TIMEOUT and PRECONDITION_NO_MET will be returned as error codes.
- Returns
- PORT_OK Normal return CONNECTION_LOST Connectin lost BUFFER_FULL Buffer full BUFFER_ERROR Buffer error BUFFER_TIMEOUT Timeout PRECONDITION_NOT_MET Precondition not met PORT_ERROR Other error
template<class DataType> virtual ReturnCode write(const DataType& data);
Reimplemented from OpenRTM_aist.OutPortConnector.OutPortConnector.
The documentation for this class was generated from the following file:
Generated by