|
OpenRTM-aist IDL
1.2
|
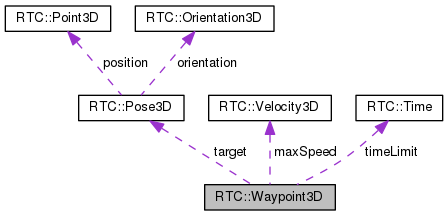
A waypoint in 3D space, including constraints. More...
import"InterfaceDataTypes.idl";
Public Attributes | |
| Pose3D | target |
| Location of the waypoint. More... | |
| double | distanceTolerance |
| How far away from the waypoint is considered success (radius in metres). More... | |
| double | headingTolerance |
| How much off the target heading is considered success (in radians). More... | |
| Time | timeLimit |
| Target time to arrive at the waypoint by. More... | |
| Velocity3D | maxSpeed |
| Maximum sped to travel at while heading to the waypoint. More... | |
A waypoint in 3D space, including constraints.
| double RTC::Waypoint3D::distanceTolerance |
How far away from the waypoint is considered success (radius in metres).
| double RTC::Waypoint3D::headingTolerance |
How much off the target heading is considered success (in radians).
| Velocity3D RTC::Waypoint3D::maxSpeed |
Maximum sped to travel at while heading to the waypoint.
| Pose3D RTC::Waypoint3D::target |
Location of the waypoint.
| Time RTC::Waypoint3D::timeLimit |
Target time to arrive at the waypoint by.
 1.8.11
1.8.11

