|
OpenRTM-aist
1.2.1
|
State machine class. More...
#include <StateMachine.h>
Public Member Functions | |
| StateMachine (int num_of_state) | |
| Constructor. More... | |
| virtual | ~StateMachine () |
| StateMachine (const StateMachine &other) | |
| StateMachine & | operator= (const StateMachine &other) |
| void | swap (StateMachine &other) |
| void | setNOP (Callback call_back) |
| Set NOP function. More... | |
| void | setListener (Listener *listener) |
| Set Listener Object. More... | |
| bool | setEntryAction (State state, Callback call_back) |
| Set Entry action function. More... | |
| bool | setPreDoAction (State state, Callback call_back) |
| Set PreDo action function. More... | |
| bool | setDoAction (State state, Callback call_back) |
| Set Do action function. More... | |
| bool | setPostDoAction (State state, Callback call_back) |
| Set PostDo action function. More... | |
| bool | setExitAction (State state, Callback call_back) |
| Set Exit action function. More... | |
| bool | setTransitionAction (Callback call_back) |
| Set state transition action function. More... | |
| void | setStartState (States states) |
| Set the initial state. More... | |
| States | getStates () |
| Get states. More... | |
| State | getState () |
| Get current state. More... | |
| bool | isIn (State state) |
| Check current state. More... | |
| void | goTo (State state) |
| Transit State. More... | |
| void | worker () |
| Worker function. More... | |
| void | worker_pre () |
| void | worker_do () |
| void | worker_post () |
Protected Member Functions | |
| void | setNullFunc (std::vector< Callback > &s, Callback nullfunc) |
| Set NOP function. More... | |
Protected Attributes | |
| int | m_num |
| Number of state. More... | |
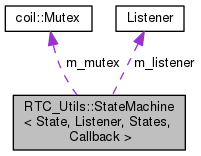
| Listener * | m_listener |
| Callback function for listener. More... | |
| std::vector< Callback > | m_entry |
| Callback function for Entry action. More... | |
| std::vector< Callback > | m_predo |
| Callback function for PreDo action. More... | |
| std::vector< Callback > | m_do |
| Callback function for Do action. More... | |
| std::vector< Callback > | m_postdo |
| Callback function for PostDo action. More... | |
| std::vector< Callback > | m_exit |
| Callback function for Exit action. More... | |
| Callback | m_transit |
| Callback function for State transition action. More... | |
| States | m_states |
| Current state information. More... | |
| bool | m_selftrans |
| Mutex | m_mutex |
State machine class.
StateMachine class is a class to realize a state machine.
Example: ActiveObject assumes to be an active object that has the state machine. There are three states such as INACTIVE, ACTIVE and ERROR state, and if you want to define Entry or Exit action, this class will realize as follows:
class ActiveObject
{
public:
enum MyState { INACTIVE, ACTIVE, ERROR };
typedef States<MyState> MyStates; ActiveObject()
: m_sm(3)
{
m_sm.setNOP(&ActiveObject::nullAction);
m_sm.setListener(this); m_sm.setExitAction(INACTIVE, &ActiveObject::inactiveExit);
:
m_sm.setPostDoAction(ERROR, &ActiveObject::errorPostDo);
m_sm.setTransitionAction(&ActiveObject:transition);
}; bool nullAction(MyStates st) {};
bool inactiveExit(MyStates st) {};
:
bool errorPostDo(MyStates st) {};
bool transition(MyStates st) {};private: StateMachine<MyState, bool, ActiveObject> m_sm; };
If you want to give a class to some states, you must implement the class to satisfy the following conditions:
In this class, you can define the following five actions for one state:
Transition action is an action invoked at the transition between any states, and you must define its behavior.
This class executes each action according to the following timing.
If the state is changed and transits(A->B) state,
(A:Exit)->|(state update:A->B)->(B:Entry)->(B:PreDo)->(B:Do)->(B:PostDo)
If the state is not changed and remains B state, (| shows a step's break) (B(n-1):PostDo)->|(B(n):PreDo)->(B(n):Do)->(B(n):PostDo)->|(B(n+1):PreDo) PreDo, Do and PostDo are executed over and over again.
| State | Type of the state |
| Listener | Listener object for action |
| States | State holder |
| Callback | Callback function for action |
|
inline |
Constructor.
Constructor
| num_of_state | Number of states in the state machine |
|
inlinevirtual |
|
inline |
|
inline |
Get current state.
Get current state.
|
inline |
Get states.
Get state information. Get the current state, the previous state and the next state to be expected to transfer.
|
inline |
Transit State.
Transit to the specified state. This function sets the next state forcibly. Therefore, to determine the next state, users must get current state and implement that logic. If transit destination is the same as the current state, flag of self-transition will be set.
| state | State of the transition destination |
|
inline |
Check current state.
Check whether current state matches the state specified by argument.
| state | Target state for the check |
|
inline |
|
inline |
Set Do action function.
Set callback function for Do action that is executed in each state.
| state | Target state for the set |
| call_back | Callback function for Do action |
|
inline |
Set Entry action function.
Set callback function for Entry action that is executed when entering in each state.
| state | Target state for the set |
| call_back | Callback function for Entry action |
|
inline |
Set Exit action function.
Set callback function for Exit action that is executed in each state.
| state | Target state for the set |
| call_back | Callback function for Exit action |
|
inline |
|
inline |
Set NOP function.
Set NOP function that does not do anything
| call_back | Callback function |
|
inlineprotected |
Set NOP function.
Set NOP function (function to do nothing).
| s | Callback function for setting |
| nullfunc | Callback function (NOP function) |
|
inline |
Set PostDo action function.
Set callback function for PostDo action that is executed in each state.
| state | Target state for the set |
| call_back | Callback function for PostDo action |
|
inline |
Set PreDo action function.
Set callback function for PreDo action that is executed in each state.
| state | Target state for the set |
| call_back | Callback function for PreDo action |
|
inline |
Set the initial state.
Set the initial state of the state machine.
| states | Initial state |
|
inline |
Set state transition action function.
Set callback function for State transition action that is executed when transiting to the state.
| call_back | Callback function for State transition |
|
inline |
|
inline |
Worker function.
This is a worker function of the state machine. Execute the invocation of each action at actual state transition and the state transition occurrence.
|
inline |
|
inline |
|
inline |
|
protected |
Callback function for Do action.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
Callback function for Entry action.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
Callback function for Exit action.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
Callback function for listener.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
|
protected |
Number of state.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
Callback function for PostDo action.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
Callback function for PreDo action.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
|
protected |
Current state information.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
|
protected |
Callback function for State transition action.
Referenced by RTC_Utils::StateMachine< ExecContextState, RTC_impl::RTObjectStateMachine >::swap().
 1.8.11
1.8.11

