|
OpenRTM-aist IDL
1.2
|
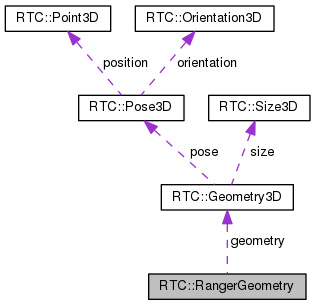
Geometry of a ranger device. A range sensor may be a single device returning multiple ranges (such as a laser scanner), or an array of sensing elements each returning a single range value (such as an array of sonar sensors). If there is only one sensing element in the device, the device should be considered a laser scanner type. If there are multiple elements, the device should be considered an array of single-range-value sensors. More...
import"InterfaceDataTypes.idl";
Public Attributes | |
| Geometry3D | geometry |
| Overall geometry of the ranger device, such as the centroid of an array of sonar sensors. More... | |
| ElementGeometryList | elementGeometries |
Geometry of a ranger device. A range sensor may be a single device returning multiple ranges (such as a laser scanner), or an array of sensing elements each returning a single range value (such as an array of sonar sensors). If there is only one sensing element in the device, the device should be considered a laser scanner type. If there are multiple elements, the device should be considered an array of single-range-value sensors.
| ElementGeometryList RTC::RangerGeometry::elementGeometries |
Geometry of each individual sensing element. The range values should be considered measured from each of these.
| Geometry3D RTC::RangerGeometry::geometry |
Overall geometry of the ranger device, such as the centroid of an array of sonar sensors.
 1.8.11
1.8.11

