import "ExtendedDataTypes.idl";
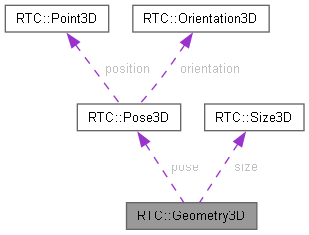
RTC::Geometry3D 連携図
公開変数類 | |
| Pose3D | pose |
| Size3D | size |
| Size of the device, taken with the origin at its base point. | |
メンバ詳解
◆ pose
| Pose3D RTC::Geometry3D::pose |
Pose of the device's base point in its parent device's (e.g. the robot's) coordinate space.
◆ size
| Size3D RTC::Geometry3D::size |
Size of the device, taken with the origin at its base point.
この構造体詳解は次のファイルから抽出されました:
構築: