|
OpenRTM-aist IDL
1.2
|
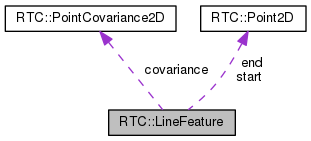
A line feature. [詳解]
import"InterfaceDataTypes.idl";
公開変数類 | |
| double | probability |
| Probability of the feature. [詳解] | |
| double | rho |
| Length of the line vector in metres. [詳解] | |
| double | alpha |
| Angle of the line vector from the x axis in radians. [詳解] | |
| PointCovariance2D | covariance |
| Covariance matrix of rho and alpha. [詳解] | |
| Point2D | start |
| Start point of the line segment. [詳解] | |
| Point2D | end |
| End point of the line segment. [詳解] | |
| boolean | startSighted |
| True if the start point of the line has been sighted (i.e. it is inside seen space). [詳解] | |
| boolean | endSighted |
| True if the end point of the line has been sighted (i.e. it is inside seen space). [詳解] | |
A line feature.
| double RTC::LineFeature::alpha |
Angle of the line vector from the x axis in radians.
| PointCovariance2D RTC::LineFeature::covariance |
Covariance matrix of rho and alpha.
| Point2D RTC::LineFeature::end |
End point of the line segment.
| boolean RTC::LineFeature::endSighted |
True if the end point of the line has been sighted (i.e. it is inside seen space).
| double RTC::LineFeature::probability |
Probability of the feature.
| double RTC::LineFeature::rho |
Length of the line vector in metres.
| Point2D RTC::LineFeature::start |
Start point of the line segment.
| boolean RTC::LineFeature::startSighted |
True if the start point of the line has been sighted (i.e. it is inside seen space).
 1.8.11
1.8.11

