PublisherNew class [詳解]
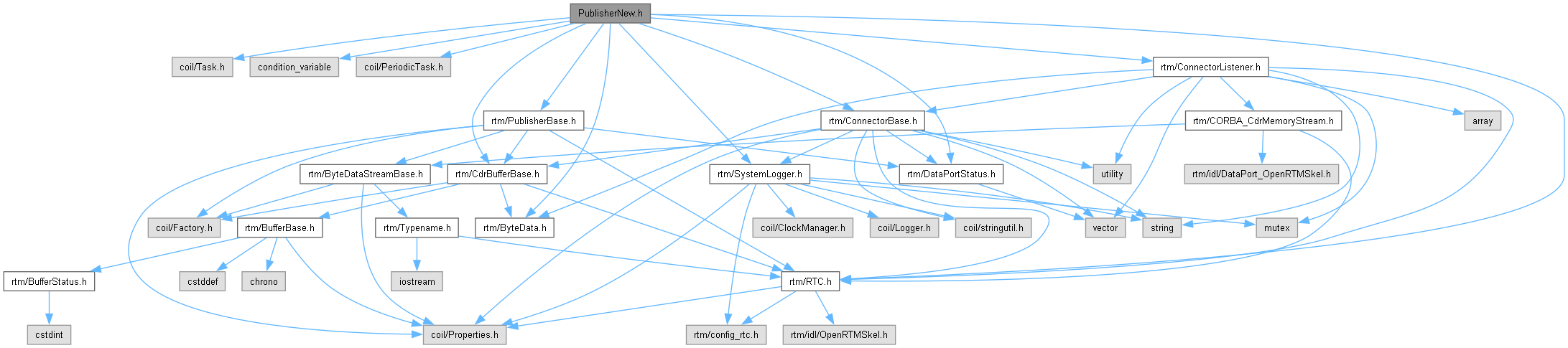
#include <coil/Task.h>#include <condition_variable>#include <coil/PeriodicTask.h>#include <rtm/RTC.h>#include <rtm/PublisherBase.h>#include <rtm/CdrBufferBase.h>#include <rtm/DataPortStatus.h>#include <rtm/SystemLogger.h>#include <rtm/ConnectorBase.h>#include <rtm/ConnectorListener.h>#include <rtm/ByteData.h>
PublisherNew.h の依存先関係図:
クラス | |
| class | RTC::PublisherNew |
| PublisherNew クラス [詳解] | |
名前空間 | |
| namespace | coil |
| namespace | RTC |
| RTコンポーネント | |
関数 | |
| void | PublisherNewInit () |
詳解
PublisherNew class
- 日付
- Date
- 2007-12-31 03:08:06
Copyright (C) 2006-2010 Noriaki Ando Task-intelligence Research Group, Intelligent Systems Research Institute, National Institute of Advanced Industrial Science and Technology (AIST), Japan All rights reserved.
$Id$
関数詳解
◆ PublisherNewInit()
| void PublisherNewInit | ( | ) |
構築: