Terminator クラス [詳解]
#include <Manager.h>
RTC::Manager::Terminator の継承関係図
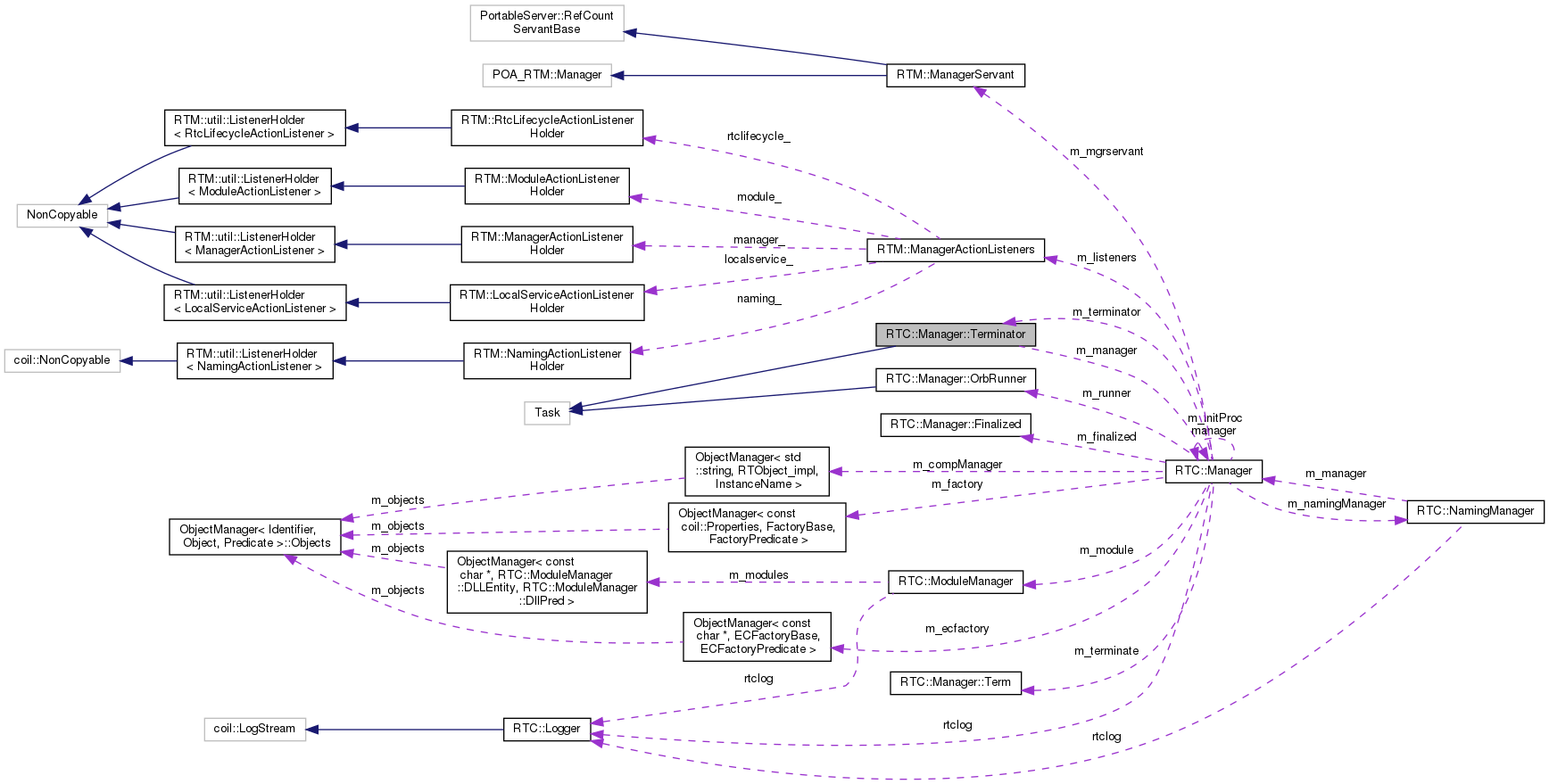
RTC::Manager::Terminator 連携図
公開メンバ関数 | |
| Terminator (Manager *manager, double waittime=0) | |
| コンストラクタ [詳解] | |
| void | terminate () |
| 終了処理 [詳解] | |
| virtual int | open (void *args) |
| 終了処理活性化処理 [詳解] | |
| virtual int | svc (void) |
| ORB,マネージャ終了処理 [詳解] | |
公開変数類 | |
| Manager * | m_manager |
| coil::TimeValue | m_waittime |
詳解
構築子と解体子
◆ Terminator()
|
inline |
コンストラクタ
コンストラクタ
- 引数
-
manager マネージャ・オブジェクト
関数詳解
◆ open()
|
inlinevirtual |
◆ svc()
|
inlinevirtual |
ORB,マネージャ終了処理
ORB,マネージャ終了処理
- 戻り値
- 終了処理結果
◆ terminate()
|
inline |
終了処理
ORB,マネージャ終了処理を開始する。
メンバ詳解
◆ m_manager
| Manager* RTC::Manager::Terminator::m_manager |
◆ m_waittime
| coil::TimeValue RTC::Manager::Terminator::m_waittime |
このクラス詳解は次のファイルから抽出されました:
