RTC::InPort< DataType > Class Template Reference
InPort template class. More...
#include <InPort.h>
Public Member Functions | |
| DATAPORTSTATUS_ENUM | InPort (const char *name, DataType &value, int bufsize=64, bool read_block=false, bool write_block=false, int read_timeout=0, int write_timeout=0) |
| A constructor. | |
| virtual | ~InPort (void) |
| Destructor. | |
| virtual const char * | name () |
| Get port name. | |
| virtual bool | isNew () |
| Check whether the data is newest. | |
| virtual bool | isEmpty () |
| Check whether the data is newest. | |
| bool | read () |
| Readout the value from DataPort. | |
| virtual void | update () |
| Read the newly value to type-T variable which is bound to InPort's buffer. | |
| void | operator>> (DataType &rhs) |
| Read the newly value data in InPort to type-T variable. | |
| DataPortStatus::Enum | getStatus (int index) |
| Getting specified connector's writing status. | |
| DataPortStatusList | getStatusList () |
| Getting specified connector's writing status list. | |
| void | setOnRead (OnRead< DataType > *on_read) |
| Set callback when data is read from the InPort buffer. | |
| void | setOnReadConvert (OnReadConvert< DataType > *on_rconvert) |
| Set callback when data is readout to the InPort buffer. | |
Detailed Description
template<class DataType>
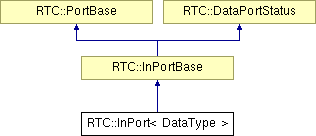
class RTC::InPort< DataType >
InPort template class.
This is a template class that implements InPort. <T> is the type defined in BasicDataType.idl and must be the structure which has both Time type tm and type-T data as a member. InPort has a ring buffer internally, and stores the received data externally in this buffer one by one. The size of ring buffer can be specified according to the argument of constructor, though the default size is 64. Unread data and data which is already read are managed with the flag, and the data can be handled by the isNew(), write(), read(), isFull() and isEmpty() method etc.
- Since:
- 0.2.0
Constructor & Destructor Documentation
| DATAPORTSTATUS_ENUM RTC::InPort< DataType >::InPort | ( | const char * | name, | |
| DataType & | value, | |||
| int | bufsize = 64, |
|||
| bool | read_block = false, |
|||
| bool | write_block = false, |
|||
| int | read_timeout = 0, |
|||
| int | write_timeout = 0 | |||
| ) | [inline] |
A constructor.
constructor. This is bound to type-T variable given as a parameter.
- Parameters:
-
name A name of the InPort. This name is referred by InPortBase::name(). value type-T variable that is bound to this InPort. bufsize Buffer length of internal ring buffer of InPort (The default value:64) read_block Flag of reading block. When there are not unread data at reading data, set whether to block data until receiving the next data. (The default value:false) write_block Flag of writing block. If the buffer was full at writing data, set whether to block data until the buffer has space. (The default value:false) read_timeout Data reading timeout time (millisecond) when not specifying read blocking. (The default value:0) write_timeout Data writing timeout time (millisecond) when not specifying writing block. (The default value:0)
| virtual RTC::InPort< DataType >::~InPort | ( | void | ) | [inline, virtual] |
Destructor.
Destructor
Member Function Documentation
| DataPortStatus::Enum RTC::InPort< DataType >::getStatus | ( | int | index | ) | [inline] |
Getting specified connector's writing status.
An InPort has Connectors that are virtual data stream channel for each connection. "write()" function write into these Connectors, and each Connector returns writing-status. write() function will return a true value if all Connectors return normal status, and a false value will be returned if at least one Connector failed. This function can be used to inspect each return status
- Parameters:
-
index Connector index
- Returns:
- Writing status
| DataPortStatusList RTC::InPort< DataType >::getStatusList | ( | ) | [inline] |
Getting specified connector's writing status list.
An InPort has Connectors that are virtual data stream channel for each connection. "write()" function write into these Connectors, and each Connector returns writing-status. write() function will return a true value if all Connectors return normal status, and a false value will be returned if at least one Connector failed. This function can be used to inspect each return status
- Returns:
- Writing status list
| virtual bool RTC::InPort< DataType >::isEmpty | ( | void | ) | [inline, virtual] |
Check whether the data is newest.
Check whether the data stored at a current buffer position is newest.
- Returns:
- Newest data check result ( true:Newest data. Data has not been readout yet. false:Past data.Data has already been readout.)
References RTC::InPortBase::m_connectors, RTC::PortBase::m_connectorsMutex, RTC_DEBUG, and RTC_TRACE.
| virtual bool RTC::InPort< DataType >::isNew | ( | ) | [inline, virtual] |
Check whether the data is newest.
Check whether the data stored at a current buffer position is newest.
- Returns:
- Newest data check result ( true:Newest data. Data has not been readout yet. false:Past data.Data has already been readout.)
References RTC::InPortBase::m_connectors, RTC::PortBase::m_connectorsMutex, RTC_DEBUG, and RTC_TRACE.
| virtual const char* RTC::InPort< DataType >::name | ( | ) | [inline, virtual] |
Get port name.
Get port name.
- Returns:
- The port name
| void RTC::InPort< DataType >::operator>> | ( | DataType & | rhs | ) | [inline] |
Read the newly value data in InPort to type-T variable.
Read the newly data set in InPort and set to specified data variable.
- Parameters:
-
rhs The type-T variable to read from InPort's buffer
References RTC::InPort< DataType >::read().
| bool RTC::InPort< DataType >::read | ( | ) | [inline, virtual] |
Readout the value from DataPort.
Readout the value from DataPort
- When Callback functor OnRead is already set, OnRead will be invoked before reading from the buffer held by DataPort.
- When the buffer held by DataPort can detect the underflow, and when it detected the underflow at reading, callback functor OnUnderflow will be invoked.
- When callback functor OnReadConvert is already set, the return value of operator() of OnReadConvert will be the return value of read().
- When timeout of reading is already set by setReadTimeout(), it waits for only timeout time until the state of the buffer underflow is reset, and if OnUnderflow is already set, this will be invoked to return.
- Returns:
- Readout result (Successful:true, Failed:false)
Implements RTC::InPortBase.
References RTC::DataPortStatus::BUFFER_EMPTY, RTC::DataPortStatus::BUFFER_TIMEOUT, RTC::InPortBase::m_connectors, RTC::PortBase::m_connectorsMutex, RTC::DataPortStatus::PORT_OK, RTC_DEBUG, RTC_ERROR, RTC_TRACE, and RTC_WARN.
Referenced by RTC::InPort< DataType >::operator>>(), and RTC::InPort< DataType >::update().
| void RTC::InPort< DataType >::setOnRead | ( | OnRead< DataType > * | on_read | ) | [inline] |
| void RTC::InPort< DataType >::setOnReadConvert | ( | OnReadConvert< DataType > * | on_rconvert | ) | [inline] |
Set callback when data is readout to the InPort buffer.
Set the callback object that is invoked when data is readout to the InPort's buffer. The return value of callback object is the return result of the read() method.
- Parameters:
-
on_rconvert OnReadConvert<DataType> type object
| virtual void RTC::InPort< DataType >::update | ( | void | ) | [inline, virtual] |
Read the newly value to type-T variable which is bound to InPort's buffer.
Read the newly value to type-T data which is bound to InPort's buffer. The type-T variable must be bound to InPort in constructor. Since this method assumes to be used for polymorphic, its argument and the return value do not depend on type.
References RTC::InPort< DataType >::read().