車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。
●本コンポーネントの動作には、EusLisp用RTMインタフェースrtmeusが必要です。 つぎのところからダウンロード、インストールしてください。 http://code.google.com/p/rtmeus/
修正BSDライセンスに基づき配布されます。 詳しくは、LICENSE.txtファイルをご覧ください。
東京大学 知能機械情報学専攻 情報システム工学研究室 itngr@jsk.t.u-tokyo.ac.jp
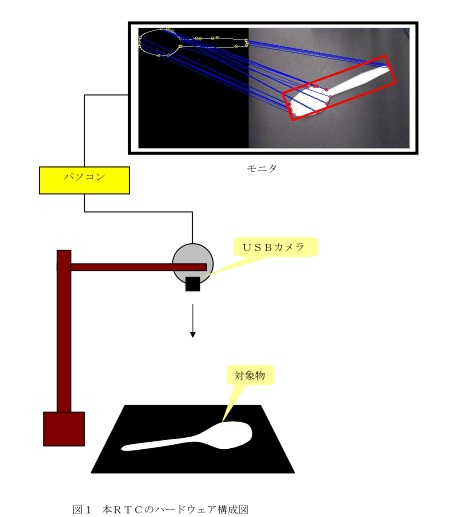
コンポーネントは、共通Sense I/F※を備えた画像認識コンポーネントで カメラで物体(スプーン、ナイフなど)の部分エッジ(曲線)を検出し 予め登録した曲線と照合して、その物体の重心位置・姿勢を算出するものである。
バイナリー提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
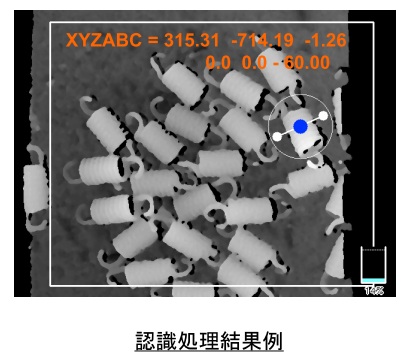
アクティブパターン投光型3次元レンジファインダー(三菱電機(株)Micro3D) センサーに対応して3次元情報及び濃淡画像情報を用いて部品ピッキングのための 物体認識処理を行うモジュールです。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
このコンポーネントは関東自動車工業株式会社の「Patrafour」(パトラフォー)用の 制御コンポーネントです。
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
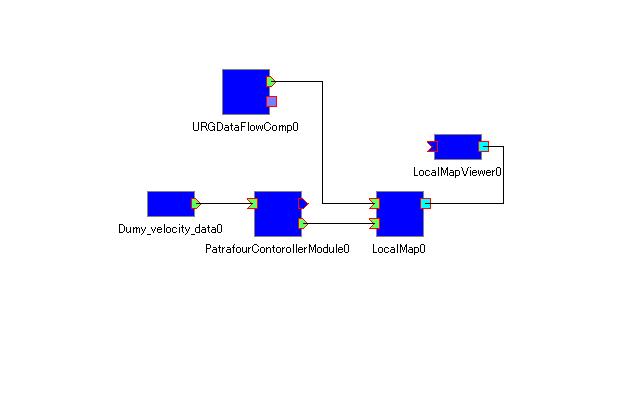
開発したRTCは人を含む障害物と目標のワールド座標系における位置と,ロボットの絶対座標系における位置および向きを受け取り ポテンシャル法の計算を行う.計算されたポテンシャルデータはロボットの移動方向と速度,周辺地図情報の出力に利用される.
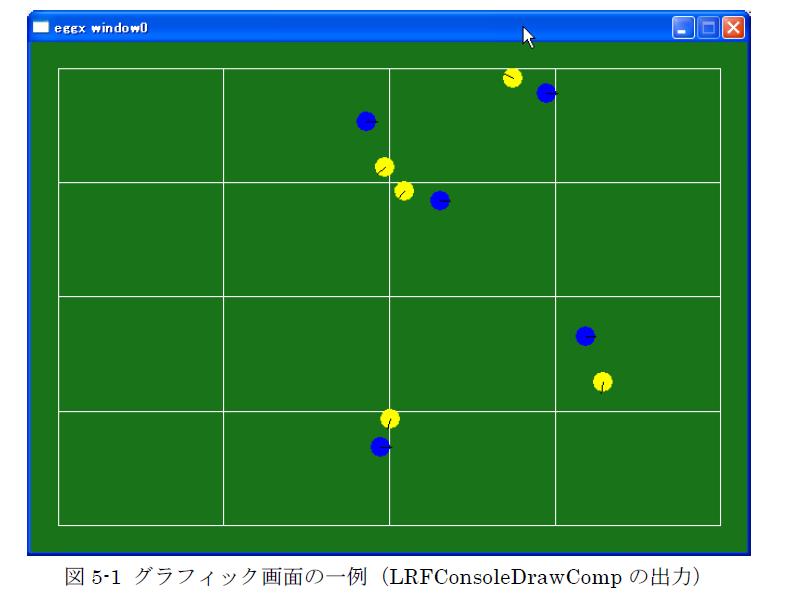
障害物の運動推定を行なうコンポーネントです。 障害物の運動推定コンポーネントの動作を確認するために,円運動をする 模擬的な障害物の位置情報を出力するコンポーネントと運動推定コンポー ネントの入力と出力を二次元座標上に描画するコンポーネントと組み合わせて 実行します。
商用以外の利用の場合、EPLライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
大阪電気通信大学 総合情報学部 メディアコンピュータシステム学科 升谷 保博 E-MAIL: masutani@isc.osakac.ac.jp 〒575-0063 大阪府四條畷市清滝1130-70 TEL&FAX: 072-876-5107
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


車輪型移動ロボットのための総合開発環境(群)
概要
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
特徴
インターフェース
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
ライセンス(公開条件)
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。