あらかじめ用意されたXML台本の進行にしたがって,ロボットを同期して制御するコンポーネント群です.音声合成による発話やロボットの動きを同期して制御します.複数台のロボットを使用すれば,ロボット同士の対話を実現することも可能です.
LEGO Mindstorms EV3上にRTミドルウェア OpenRTM-aist を搭載し、ロボットプログラミング学習用途に供するための基盤開発環境です。
2015年9月19日(土)に大阪工業大学大宮キャンパスにおいて,RTミドルウェア講習会を開催いたしました.
お忙しいところ、RTミドルウエアサマーキャンプ2015に貴重な時間を割いて、ご協力いただき、 ありがとうございました。皆さまのご協力のおかげで、今年もサマーキャンプを継続することができました。御礼申し上げます。
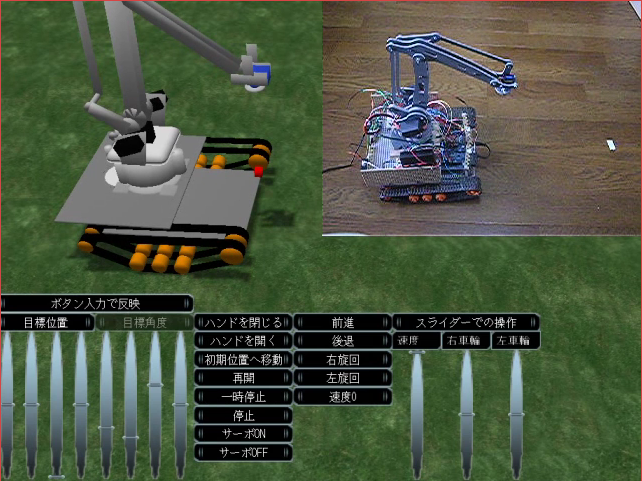
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



家電の電源状態を検出してON/OFFを制御する赤外線リモコン
概要・特徴
仕様