ビュートローバーRTCは、OpenRTM-aistを用いたRTコンポーネント開発を学習するための開発キットです。ロボット本体は、USB接続で制御するH8マイコンボードを搭載した台車型ロボット、及びミニノートPCで構成されています。
本ページは作成途中です.
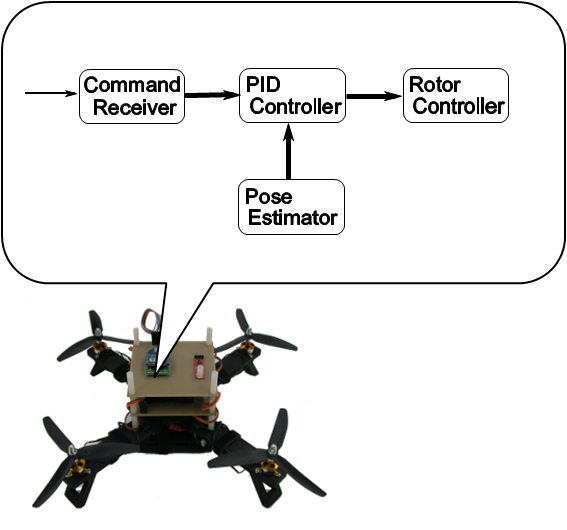
本ページはRTMコンテスト2011にて発表予定のRTコンポーネントのページです.視覚トラッキングによるクァッドロータの誘導を目的として開発中のRTコンポーネント群を公開します.ビジョンシステムは複数のカメラにより構成し,映像を複数のRTコンポーネントにより処理します.RTコンポーネント間の画像の受け渡しをデータポートにより行うと遅延が顕著となる問題に対し,処理速度を改善する目的で共有メモリを使用して画像の受け渡しを 行います。
共有メモリを使用して画像の受け渡しを行うには、RTコンポーネント間で共有メモリセグメントおよびそのセグメント上の画像の識別名を 受信側のRTコンポーネントが知る必要があります。これにはサービスポートを利用して、送信側から受信側に識別名を通知します。
随時更新していきます.(Windowsに対応しました.)
近年サービスロボットが発展してきており,サービスロボットが人間の日常環境で動作するためには人間とロボットのインタラクション方法は重要な課題である.この課題に対して,本システムでは,直接的なインタラクションとしての音声認識技術と,サービスロボットに必要な能力の1つの物体認識を組み合わせたシステムを構築した.本システムは,公開されているRTコンポーネントをベースに構築しており,音声認識コンポーネントの群のOpenHRI,さらにアピアランスベース物体認識コンポーネントや,共通カメラインタフェースに基づくカメラコンポーネントなどから構成されており,幅広いロボットシステムへの応用可能なシステムとなっている.
OpenHRIは、音声認識・音声合成・対話制御など、ロボットのコミュニケーション機能の実現に必要な各要素を実現するコンポーネント群です。 フリーで利用できる各オープンソースソフトウェアを使い易いコンポーネントとしてまとめました。
http://openhri.net/
OpenHRIのライセンスは、Eclipse Public License (EPL)です。 http://www.eclipse.org/legal/epl-v10.html EPLは、コードの改変や再配布、営利利用を許可するオープンソースライセンスですが、場合によっては改変内容をライセンス元に開示する必要があります。 OpenHRIが内部で用いているJuliusやOpen JTalkなどのそれぞれのソフトウェアについては、各自のライセンスに従います。
本ページはRTミドルウェアコンテスト2013で発表予定のRTCページです。 レーザーレンジファインダを搭載した移動ロボット(Roomba)を用いて、自律的に地図を作るシステムを提供します。 このRTC群は、Kartoライブラリを用いたSLAMや経路計画、自己位置推定などの環境地図RTCと、北陽電気のレーザーレンジファインダ、iRobot社のRoombaを制御するRTCが含まれています。
地図システムのコンポーネント群全体について、再利用性を高めるため、データポートを使用し、標準の構造体を使用して設計・構成しています。 そのため、標準のデータ型を使用すれば、一部RTCを置き換える事も可能です。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




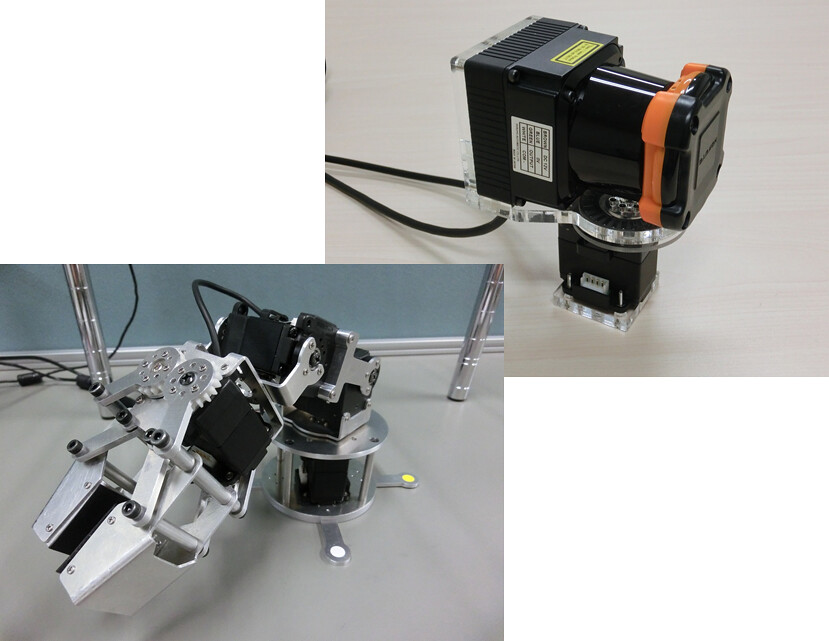

追尾カメラモジュール制御RTC群
概要
特徴
仕様
コンポーネント群
ソースコード/マニュアル/紹介動画/プレゼンテーション資料