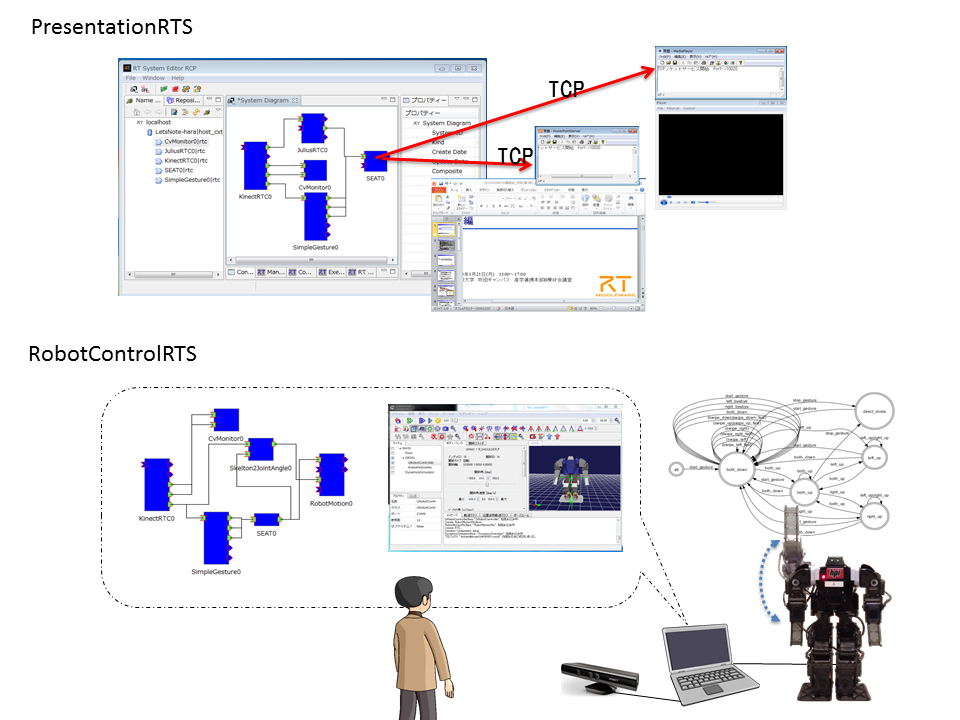
対話型のシステム構築を容易にするために作成したRTコンポーネント群です。ここで公開するRTコンポーネントは、既に、公開されているOpenHRIとともに公開する予定です。
対話型システムのためのRTコンポーネント群として以下のコンポーネントを開発しています。
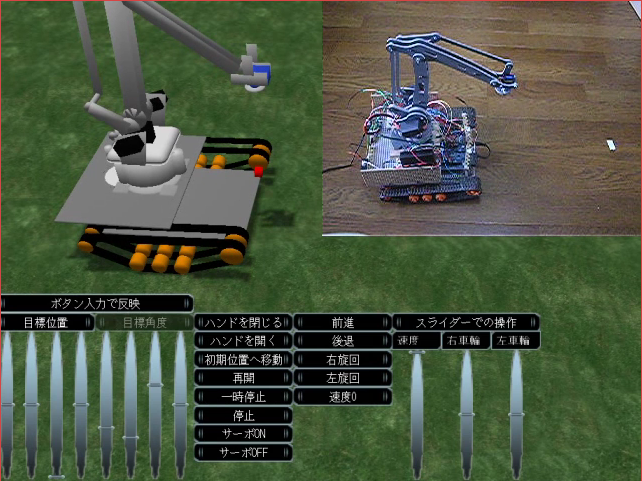
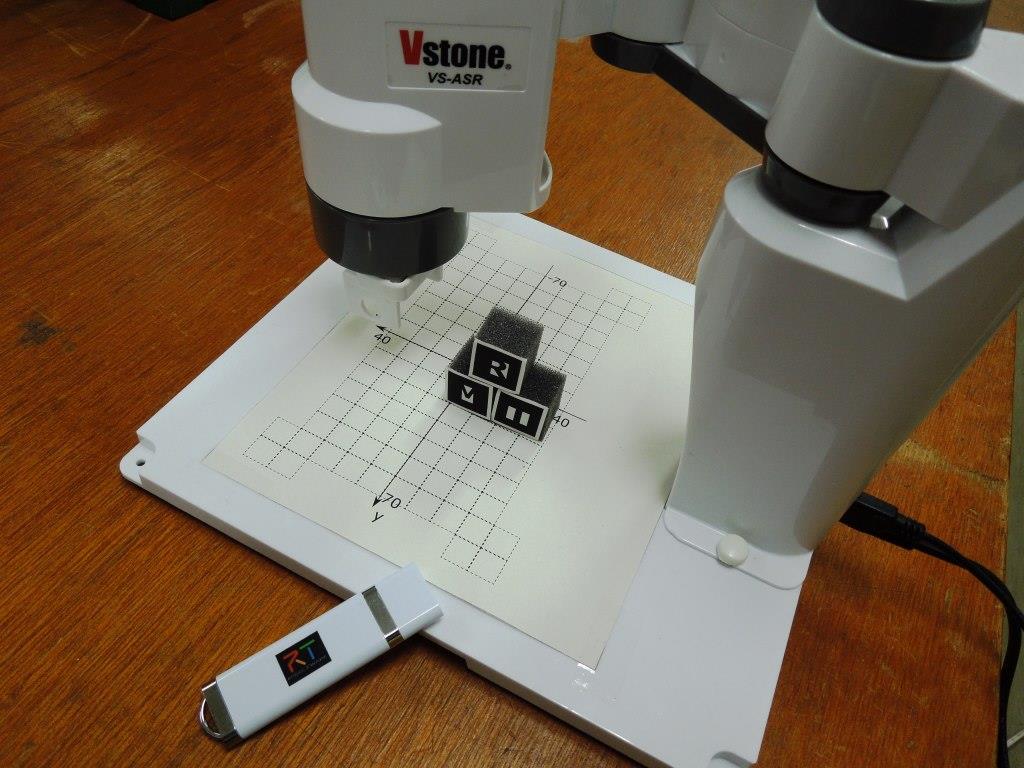
ヴイストン株式会社製アカデミックスカラロボットを手軽に制御できるツールを開発しました.
ダウンロードして,すぐに始められます.まずは,お試しください.
ロボット教育ツールの使い方は,こちら(GitHub)から参照できます.
USBメモリへの実装後については,説明動画を用意してあります.こちら(YouTube)から視聴することができます.
ロボット教育ツールを含むOpenRTM Tutorialのパッケージは,こちら(GitHub)からダウンロードできます.
ヴイストン株式会社製アカデミックスカラロボット,および三菱電機株式会社製MELFA RV-3SDにおいて,ハードウエアRTCの交換で同一のパレタイジングデモを実現しました.
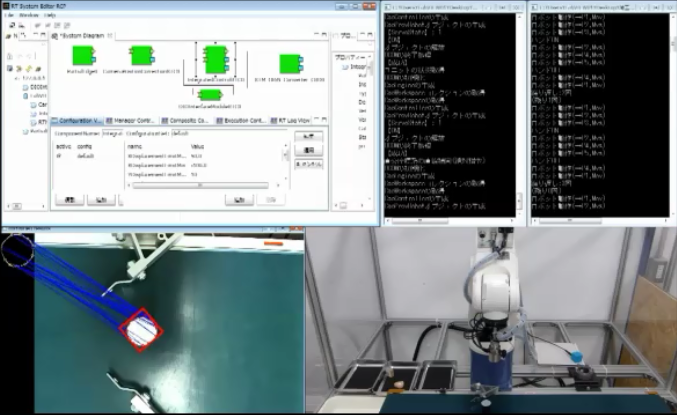
OpenRTM TutorialにARToolKitを利用したパレタイジングデモを実装しました(ただし,アカデミックスカラロボットについてのみ,チュートリアルの言語は日本語のみ).
ARToolKitを利用したパレタイジングデモを含むOpenRTM Tutorialのパッケージは,こちら(GitHub)からダウンロードできます.
2015年12月2日~5日に東京ビックサイトで開催された国際ロボット展(iREX2015)のNEDOブースに出展しました.
当日の資料は,以下よりダウンロードできます.
あらかじめ用意されたXML台本の進行にしたがって,ロボットを同期して制御するコンポーネント群です.音声合成による発話やロボットの動きを同期して制御します.複数台のロボットを使用すれば,ロボット同士の対話を実現することも可能です.
RTMとORiNの連携によって産業用ロボット汎用RTCを開発し、RTMの産業機器用ハードウエアRTCを拡充した.
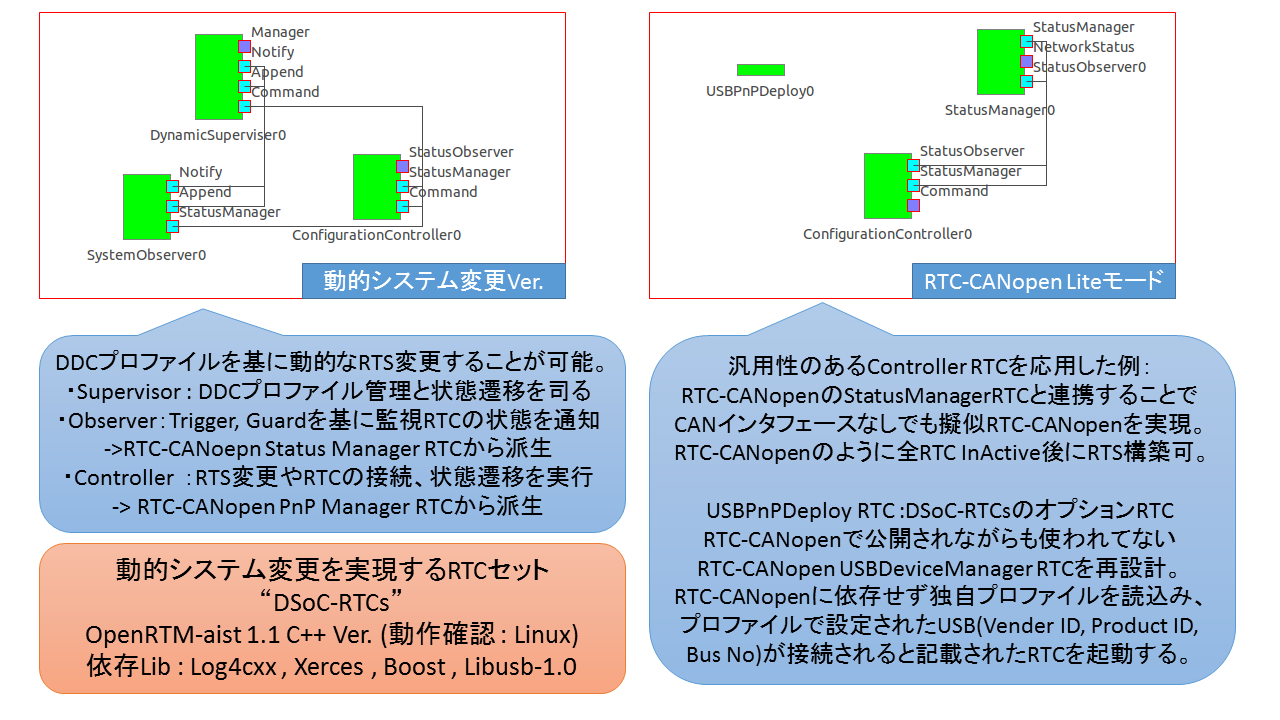
本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です. 例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。 ・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。
コンポーネントの使い方はzipファイル内のreadme.txtに記述してあります.
他にもHI-brainホームページには様々なコンポーネントが登録されています. OpenCV関数群を簡単にRTC化する「OpenCV-RTC」や,網膜モデルなど様々な視覚数理モデルRTCが入っているUbuntuインストールディスクなどが提供されています. ※利用時には新規GitHubアカウントの作成を推奨します. ※モデルRTCを簡単に共有可能とするため,GitHubアカウントに登録されたプロジェクトが自動的にHI-brainに読み込まれます.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


オフィスソフトを操作するためのRTC群
概要・特徴
OpenOffice、Microsoft Officeの表計算機能、文書作成機能等をRTミドルウェアを使ったシステムで利用するためのRTコンポーネント群です。